基于CAN总线的数据采集与控制系统设计

摘要:为了保证数据传输的实时性、可靠性,解决数据传输过程中易受干扰的问题,并保证数据采集和控制系统的性能,采用CAN总线作为现场总线来实现数据传输。经过对系统软硬件在不同环境下的多次测试,验证了该系统的性能,同时也体现了CAN总线在通信能力、可靠性和实时性等方面的明显优势。
关键词:CAN总线;数据采集;控制系统;串行通信
0 引言
随着计算机网络上的高速发展,使得信息的交流与共享变得空前广泛和自如,而这项技术也渗入到自动化领域的变革当中,现场总线(Fieldbus)由此应运而生,开创了工业控制的新篇章。现场总线是一种应用于生产现场,在现场设备之间、现场设备和控制装置之间实行双向、串形、多结点的数字通信技术,在当今自动化领域中具有广阔的发展前景。本文给出了一种基于CAN总线的数据采集与控制系统设计方案,实现对开关量的数据采集和对外部设备的控制功能。
控制器局域网(Controller Area Network,CAN)总线是现场总线的一种,是一种有效支持分布式控制或实时控制的串行网络通信,已经被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面,并被公认为最有前途的现场总线之一,其主要特点如下:
(1)CAN是有国际标准的现场总线。
(2)CAN为多主工作方式,网络上的任意一节点都可在任意时刻向网络上的其他节点发送信息,且不分主从。
(3)CAN采用非破坏总线仲裁技术。当多个节点同时向总线发送信息出现冲突时,优先级低的节点将主动退出发送,而优先级高的节点不受影响继续发送。
(4)CAN节点在错误严重的情况下具有自动关闭输出功能,使总线上其他节点的操作不受影响。
(5)报文采用短帧结构,传输时间短,受干扰概率低,而且每帧都有CRC校验及其他校验措施,具有极好的检错效果。
(6)CAN的直接最远通信距离可达10 km,最高通信速率可达1 Mb/s。
1 系统总体结构设计
系统主要由上位机(PC机)和数据采集和控制模块组成。系统总体结构设计如图1所示。

上位机是整个系统的核心,实现系统的监控和管理功能。CAN总线智能适配卡的作用是收集各个CAN节点上的数据,然后转发到上位机,同时把上位机的命令转发到各个节点。由于CAN总线特有的多主传输方式,各个节点根据需要自主地向总线发送数据,而且在上位机监听各个节点的同时,节点也实时监听总线并接收自己需要的数据。数据采集和控制模块采用微处理器和可编程的CAN控制芯片,主要用于完成现场数据的采集、数据的传送以及各个现场设备运行的控制。
2 数据采集和控制模块硬件设计
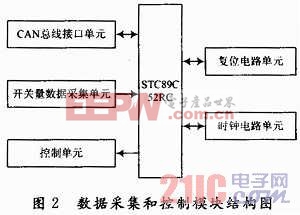
基于CAN总线的数据采集与控制系统将功能尽可能地分散到各个控制模块中,各个模块以微处理器为核心,完成数据采集和控制功能。为了使信息能在CAN协议的标准下进行通信,各个模块都设有CAN总线接口电路。该模块的微处理器(MCU)选用宏晶科技的STC89C52RC单片机。STC89C52RC是新一代超强抗干扰、高速、低功耗的8位单片机,指令代码完全兼容传统的8051单片机,36个通用I/O口,3个16位定时器/计数器,4路外部中断。根据实际需求分析,STC89C52RC单片机完全满足本设计的需求。数据采集和控制模块的结构如图2所示。











评论