基于支持向量机的无人机视觉障碍检测

摘要:自主障碍检测与回避是无人机低高度飞行时保障其生存性的一项关键技术,有重要的研究意义。通过对机器视觉原理的研究,考虑到支持向量机方法能同时减小匹配难度和计算量,实时性能、泛化性能良好,故采用该方法通过离线监督学习,将无人机前视图像分割为天空与非天空2部分,并将非天空部分作为需要回避的障碍,实现无人机基于视觉的障碍检测系统,为后续的视觉制导提供信息。实验结果表明,支持向量机能有效准确地实现图像的天空分割,并具有良好的泛化性能。
关键词:低高度飞行;支持向量机;图像分割;障碍检测
0 引言
美国军方将地形跟随飞行分为3类低空飞行模式(Low AltitLlde):低高度飞行(Low Level)、轮廓线飞行(Contour)、贴地飞行(Nap of the Earth)。以上三种低空飞行模式都提供了最低的飞行高度和最大程度的隐蔽性。低高度飞行的主要障碍是环境中的地形、植被和人工建筑,它通过在障碍上方飞行回避了障碍,并实现最低的飞行高度,因此对障碍物的检测成为低高度飞行中的重点问题。
SVM方法是建立在统计学习理论的VC维理论和结构风险最小化原理的基础上。根据有限样本信息在模型的复杂性和学习能力之间寻求最佳折衷,以期获得最好的泛化能力,它是一种小样本的机器学习方法,在减小匹配难度的同时也大大减小了计算量,可以满足实时性要求。因此本文研究利用这种方法,将无人机前视图像分割为天空与非天空2部分,并将非天空部分作为需要回避的障碍。
1 支持向量机基本理论
支持向量机是基于分离超平面的。对任何一套线性可分的数据,存在值ω和b使数据集中的任意数据点x可以用下列公式分割:
y(ω·x)+b>0 (1)
式中:y=1取决于数据点属于2个种类中哪一类(正类为+1,负类为-1),当处理一个有限数据集时,式(1)可以表述为:
![]()
式中:xi是训练集中的训练点;x是待分类的测试点;αi为权重系数;yi为类别。
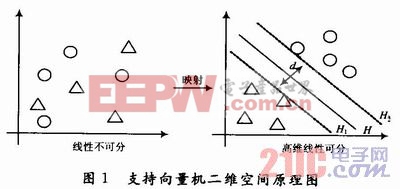
当数据集线性不可分时,通过内积核函数φexample(z)=(z,z2)将数据集非线性地映射到高维特征空间,变为线性可分的数据集,然后在高维特征空间建立一个不但能将2类正确分开,而且使分类间隔最大的最优分类面。图1是支持向量机思想在二维空间中的原理图。其中,H为最优分类面;H1,H2分别为过各类样本中离分类线最近的、且平行于分类线的直线;H1,H2之间的距离叫作分类间隔d。
在高维特征空间中,式(2)变为:

如果有一种方式可以在特征空间中直接计算(φ(x)·φ(xi)),就像在原始输入点函数中一样,就有可能将2个步骤融合到一起建立一个非线性的学习器,这样直接计算的方法称为核函数法。核函数定义为:
K(x,xi)=φ(x)·φ(xi) (4)
这样可以得到SVM分割函数的最终形式:
![]()






评论