飞行参数记录系统同步器信号的采集

飞行参数记录系统俗称“黑匣子”,是民用和军用飞机普遍加装的重要机载设备之一。飞行参数记录系统采集的同步器信号参数主要是飞机的姿态角和航向角参数,包括地平仪姿态陀螺的俯仰角、倾斜角和航向陀螺的航向角,这些都是飞行参数记录系统中重要的飞机姿态参数对于保障飞行安全,提高飞行训练水平和机务维护质量都具有十分重要的作用。
系统组成
某型机载飞行参数记录系统由飞参控制器、飞参数据采集器、防护记录器、电源4部分组成。其中飞参数据采集器采用了统一总线方式下的功能模块设计技术,按功能分为6个模块:中央处理器板、模拟量采集板、开关量采集板、频率量采集板、同步器信号采集板、固态记录卡。本文着重介绍同步器信号采集板的采集原理和实现过程。同步器信号采集板由同步器转换模块、数据锁存电路、地址译码电路、控制电路等组成,完成3路同步器信号的采集。
同步器信号采集原理
航空地平仪用来测定飞机在空间相对于地平线的状态,输出与俯仰角和倾斜角成比例的电信号;航向系统用于测定飞机相对于地磁场的航向角,输出与航向角成比例的电信号。飞机姿态和航向陀螺输出的角度信号为三相交流同步器信号。三相交流同步器又称自整角机,分解器又称旋转变压器,它们皆归类于微特电机。在传统的测角跟踪系统与机电模拟解算系统中,它们都是重要的组成部件。在转角与位移测量系统中,它们也是一种常用的角度传感器。本设计选用的ZSZ/XSZ-02是一种超小型、模块式、通用化的自整角机/旋转变压器—数字转换器,采用二阶伺服原理设计,数据输出具有三态锁存功能,采用32线双列直插金属外壳封装,体积小,重量轻,可靠性高。
输入信号可以接收来自三线自整角机的角度激励信号和参考电压信号,也可以接收来自四线旋转变压器的角度激励信号和参考电压信号。输出角度信号经过三态数据锁存器锁存、变成与TTL电平兼容的并行二进制码数字量信号。三态输出能使多个转换器直接挂在数据总线上,而且在使用禁止信号/INH时不断开转换器内部回路。该系列转换器和美国AD公司生产的SDC/RDC1740系列兼容。
为了将模拟信号变换成表示角度的数字信号,以前往往采用模拟开关、采样/保持、A/D转换器等组成转换电路来完成。近十多年来研制出将自整角机和旋转变压器输出的交流信号直接变换成数字信号的器件,即自整角机/数字转换器(SDC)和旋转变压器/数字转换器(RDC)器件。
自整角机/旋转变压器—数字转换器模块结构框图如图1所示。
自整角机输出的三线电压或旋转变压器输出的四线电压分别对应接至转换器SDC或RDC的输入端S1、S2、S3端或S1、S2、S3、S4端。
如果器件是自整角机一数字转换器,则自整角机三线输出应连接到转换器上的S1、S2和S3端,那么微型Scott变压器将这些信号转换成正弦、余弦形式。即:
V1=K1U0sinwtsinq
V2=K1U0SinwtCosq
这里q是自整角机轴角。
如果器件是旋转变压器一数字转换器,则旋转变压器四线输出应连接到转换器上的S1、S2、S3、和S4端,那么此时的微型变压器只起隔离和变压作用。
V1=K1U0sinqcoswt
V2=K1U0cosqsinwt
为便于理解转换过程,假定可逆计数器当前字状态为f,那么,V1乘以Cosf、V2乘以Sinf得到:
K1U0 sinqcosfsinwt
K1U0 cosqsinfsinwt
这些信号经误差放大器后得到:K1U0(sinqcosf-cosqsinf)sinwt
经三角函数变换后得到:K1U0sin(q-f) sinwt
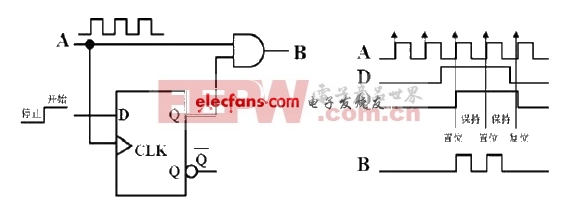
由相敏解调器、积分器、压控振荡器(VCO)和可逆计数器等组成的闭环系统使Sin(q-f)趋近于零,即q=f。当这个过程完成时,可逆计算器内的代码(f)就等于转换器的转换结果,转换器输出的二进制数字值(φ)代表了自整角机或旋转变压器输出的轴角θ,该数字值直接或通过三态锁存器送至计算机用于显示。假定禁止信号“/INH”是逻辑高电平,那么,可逆计数器被更新以后,其数字量φ将被选通进入三态锁存器,如果使能信号“/ENM”和“/ENL”是逻辑低电平,那么φ将出现在输出端上。

图1 自整角机/旋转变压器—数字转换器模块原理框图

图2 多路同步器模块连接线路框图

图3 同步器信号发送与接收模块连线图
同步器信号采集板电路设计
ZSZ/XSZ-02同步器模块控制信号有三个:/INH、/EN、BYSEL。计算机与外部设备交换数据时,要对外设发送设备选择信号/CS和读信号/RD,当数据总线为8位宽度时,计算机还需发送字节选择信号BYSEL。转换模块与计算机之间交换数据的能力与一般外部设备一样具有兼容性。/INH引脚与计算机的/CS信号相连,/EN引脚与/RD信号相连,BYSEL引脚与计算机的字节选择信号相连。当使用8位宽度的数据总线时,只需ZSZ(XSZ)的高8位依次连接到8位数据总线上。在字输出时,转换器的BYSEL引脚应接高电平(或悬空),并且模块全部数据输出线与计算机数据总线一一相连。
当进行数据传输时,计算机可向/INH端发一个逻辑低电平,从而阻止锁存器的刷新,当/INH端被置于低电平并延迟600ns后,便可读取数据。最后一个地址结束时须把/INH恢复成高电平。这里把/EN作为地址信号。线路框图见图2。也可以把每个转换器的/INH与计算机地址信号相连, /EN与计算机读信号/RD相连,并相应将时序进行调整。
自整角机激磁引线端Z1、Z2及信号输出端D1、D2、D3与ZSZ模块的参考引脚RH、RL及输入信号引脚S1、S2、S3之间按图3的对应关系接线,这种接法与电气零位调零的规则(GB13138-91)自整角机规范、(GB10241-88)旋转变压器规范相一致。若两个参考信号引脚间接反或三个信号引脚间接线错了,不会引起转换器的损坏,但会引起零位和编码方向调整的麻烦。
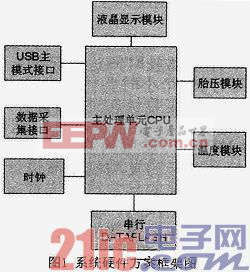
同步器信号采集板完成三路同步器信号的采集,由同步器转换模块、数据锁存电路、地址译码电路、控制电路等组成。同步器信号采集板电路组成方框图见图4。
同步器转换模块把地平仪、航向陀螺输出的三相正余弦同步器角度信号变成单片机能接收的数字量信号,同步器转换模块是一种采用跟踪转换技术和模块化结构的自整角机—数字转换器,它应用二阶伺服回路,输出是与TTL电平兼容的12位并行自然二进制码,完成角度的模/数转换,且在数字输出端包含三态锁存器。
地址译码电路,实现三路同步器转换模块的地址译码,分时读取每一路同步器模块的角度信号。控制电路由逻辑门电路组成,实现三路同步器转换模块的数据分时读取使能控制。数据锁存电路由三态数据锁存器组成,锁存同步器转换模块的高4位数据,实现12位同步器数据的分时读取。飞参数据采集器通过系统8位数据总线,分两次读取转换数据,先读取12位同步器转换模块的低8位数据,再读取同步器转换模块的高4位数据。通过同步器数据采集板完成了飞行参数记录系统同步器信号的数据采集。

图4 同步器信号采集板电路组成方框图
结语
同步器采集板在原理设计阶段,解决了12位同步器数据的同步采集存储、三路同步器信号的分时采集、同步器数据实时性随动变化、同步器采集板电源去偶滤波等技术难点。同时使用非常方便,只需将自整角机或旋转变压器的引线和转换器的引脚一一对应相连即可。为减少干扰,在同步器供电模块电源的+5V、+15V和-15V到公共地(GND)之间并联一个0.1mF和6.8mF的滤波电容。
同步器信号采集板作为飞行参数记录系统的一部分,已批量装备部队使用。同时作为试飞测试系统中机载数据采集器的一部分,已在多个系统和项目中得到广泛应用。通过用户的使用证明,系统工作稳定可靠。
参考文献
1 何立民.MCS-51系列单片机应用系统设计 系统配置与接口技术[M] .北京:北京航空航天大学出版社,1990
2 孙涵芳,徐爱卿.MCS-51系列单片机原理及应用[M] .北京:北京航空航天大学出版社,1988
3 李永敏.数字化测试技术[M] .北京:航空工业出版社,1987
4 《中船总716所产品手册》1999



评论