可编程控制器在船舶减摇鳍随动系统中应用
根据鳍角与鳍角反馈电压的比例关系图,将输入幅值在±0.9V之间变化的正弦信号作为指令信号,使减摇鳍在指令信号的控制下,在±10°之间来回摆动。保持指令信号的幅值不变,改变信号的频率,得到被控系统相应的幅值和相角。根据实验数据可以得到随动系统的幅频特性和相频特性,分别如图5和图6所示。需要注意的是,系统频率特性图中的横坐标不是通常使用的对数分度lgω,而是直接使用ω。
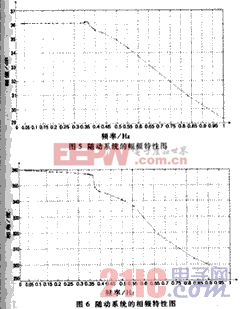
观察随动系统的幅频特性图可以看出,系统在频率小于0.35Hz之前表现出了类似放大环节的特性,且此时系统的输出几乎没有任何明显变化,与角频率变化无关,非常准确地实现了指令信号的输出,系统非常稳定。从0.35Hz开始,随着频率的增大,系统的幅频特性和相频特性均发生了改变。从整个变化过程来看,系统表现出类似惯性环节的特性,因此可以将ω=0.35Hz近似地认为是系统的转折频率或交接频率。
与幅频特性相同,随动系统的相频特性图也显示出系统在ω=0.35Hz之前的相角滞后非常小,在5°以内,可以忽略不计。在0.35Hz之后相角发生了明显的变化,整个变化趋势也类似于一个惯性环节。但与典型的惯性环节不同,在所认为的转折频率ω=0.35Hz处,系统的相角没有滞后45°左右,系统也没有象典型惯性环节一样相移-arctgTω,与角频率ω表现出严格的反正切关系。
从整个系统表现出的幅频特性和相频特性来看,改造后的随动系统可以近似地认为是由一个放大环节与惯性环节串联组成,系统在频率小于0.35Hz的低频段表现出了较好的性能,符合减摇鳍系统对随动系统的要求,可以很好地工作。
由于PLC在软件和硬件上具有突出的优点,随动系统的稳定性和精度都有所提高,系统的安装和修改也更为简单方便。经过运行测试,改造后的随动系统符合设计要求,能够稳定运行,确保了船舶减摇鳍系统的正常工作。随动系统的改造完成后,将利用可编程控制器继续完成减摇鳍控制器的设计,从而形成一套完整的应用可编程控制器实现的船舶减摇控制系统。
倾角传感器相关文章:倾角传感器原理








评论