可编程控制器在船舶减摇鳍随动系统中应用
2.3 PLC软件实现的功能
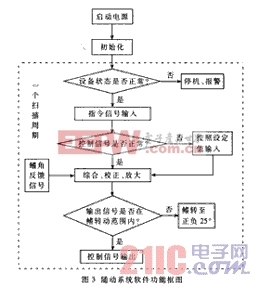
根据系统要求,程序需要实现以下功能:
(1)对来自系统油源机组的信号进行检测,如发现油温、油位等出现故障,系统停机并自动报警。
(2)对来自控制器的输入信号进行检测,保证其始终被限定在规定范围内,以保证减摇鳍工作转角不超过其极限值;并对控制信号按一定控制规律进行处理。
(3)在鳍转动工作时,将从鳍角电位计接收到的反馈信号与输入的控制信号进行比较,构成回路,实现负反馈。将控制信号与反馈信号综合处理得到的结果作为控制指令发送给输出端口。
(4)检测PLC输出给电液伺服阀的信号是否超过额定范围,如超出则做相应处理,保证伺服阀和减摇鳍正常安全地工作。
(5)在工作前或停机时根据操作需要随时将减摇鳍运行到零位或其它需要的位置。
随动系统软件功能框图如图3所示。
2.4 系统改造中存在的问题及解决方法
系统正常工作时,油温应低于60℃,油位应大于300mm,若超出上述指标,设在油箱内部的传感器开关将闭合,输出电压信号。为实现对油温和油位的检测,需要将代表油温和油压的两路信号输入给PLC进行检查这样将占用PLC模拟量输入/输出单元的两个输入端口,增加单元块的数量。考虑到油温和油压变化较缓慢,没有必要时刻监视其变化,因此用软件设置定时器,控制两个继电器交替开关,使油温和油压信号只通过一路通道交替输入PLC,在PLC内部进行检测,达到降低成本的目的。 不同鳍工作时的饱和角度不同,设计中将鳍的正常工作角度设定在±25°以内。根据真实鳍角与反馈电压的比例关系,可以确定鳍角在±25°时对应的反馈电压是±2.2V,将这两个电压值作为PLC对输入电压信号进行检测的参考值。在PLC程序中分别用十进制数值±K440表示两个参考电压。PLC控制信号在输出给电液伺服阀前也要进行检测,这一步检测的标准不是减摇鳍的工作额定电压,而是电液伺服阀的额定电流,目的是保证伺服阀可以正常安全工作。伺服阀工作的额定电流为±8mA,线圈电阻为1000±100Ω。由于FP0系列PLC输出电流范围在0~20mA之间,无法为伺服阀提供负电流,但PLC的电压输出范围在±10V之间,因此将电压值作为指令信号输入伺服阀。伺服阀串联后线圈电阻为2000Ω,由此得到伺服阀工作的电压可以达到±16V。系统设计中,为使伺服阀始终工作在线性区,将PLC对伺服阀的输入电压限定在±8V以内在PLC程序中分别用±K1600表示两个参考电压如指令信号在±8V之内,则正常输出,如果超过±8V的范围,则按照±8V输出。 由于松下FP0系列PLC的PID命令不支持负数运算,所以随动系统控制部分采用自行设计的PD控制命令。每次程序启动前PLC都先自动对各主要寄存器清零,以消除程序启动时系统产生不必要的动作。另外由于松下FP0型号不提供小数运算,因此对无法整除的数据只能采用四舍五入的处理方法,比例系数只能设定成整数。为了克服这一缺点,程序先将存储于DT20中的指令信号与鳍角反馈信号的差值乘以一个十进制的系数(如K47),将得到的数值存储在DT30中,再将DT30中的数据除以一个十进制系数(如K10),这样最终得到的数据与DT20中的数值直接乘以4.7后的结果几乎完全相同,有时两者之间会存在一个很小的偏差,可以忽略不计。这样就解决了比例系数只能是整数的不足,更准确地实现了比例控制。 2.
5 随动系统性能分析
系统软件设计完毕后,按要求安装,对各端口进行测试,确保可以正常工作后将系统启动。给设计完成的随动系统输入一个幅值为1V的阶跃信号,得到系统的单位阶跃响应如图4所示。
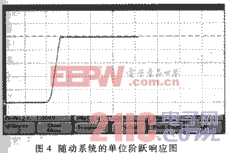
从图中可以看到,系统的最大超调量在2%以内,上升时间小于0.6s,过渡时间小于0.8s,暂态过程中的振荡次数为3。上述各项指标完全符合减摇鳍随动系统的工作要求。
除了良好的暂态品质以外,还要求足够的稳态控制精度。稳态控制精度反映了对系统的稳态特性或控制的稳态精度的要求。对于恒值控制系统,在工作中如果给定值不变,要求输出量也不变,因此注意的是扰动量所引起的稳态误差;而对于随动系统,给定量以任意规律变化,则要求输出量以一定的精度跟随给定量变化,因此注意的是被控量和给定量之间的误差。在检测随动系统性能的实验中,输入的阶跃信号幅值为1V,系统的稳态输出为0.986V,稳态误差小于2%。上述各种指标均符合减摇鳍系统对随动系统的要求。
倾角传感器相关文章:倾角传感器原理








评论