基于μC/0S―II的时问片调度法设计

#define OS_STAT_TS_USEUP 0x40
2.2 相关函数的修改
对0S_TCBInit()、OSTimeTick()、OSTimeD1y()、OS_EventTaskWait()、OS_EventTaskRdy()这5个函数的修改,是在μC/OS―II基础上实现时间片调度法的关键。下面将一一对这几个函数的修改部分进行说明。
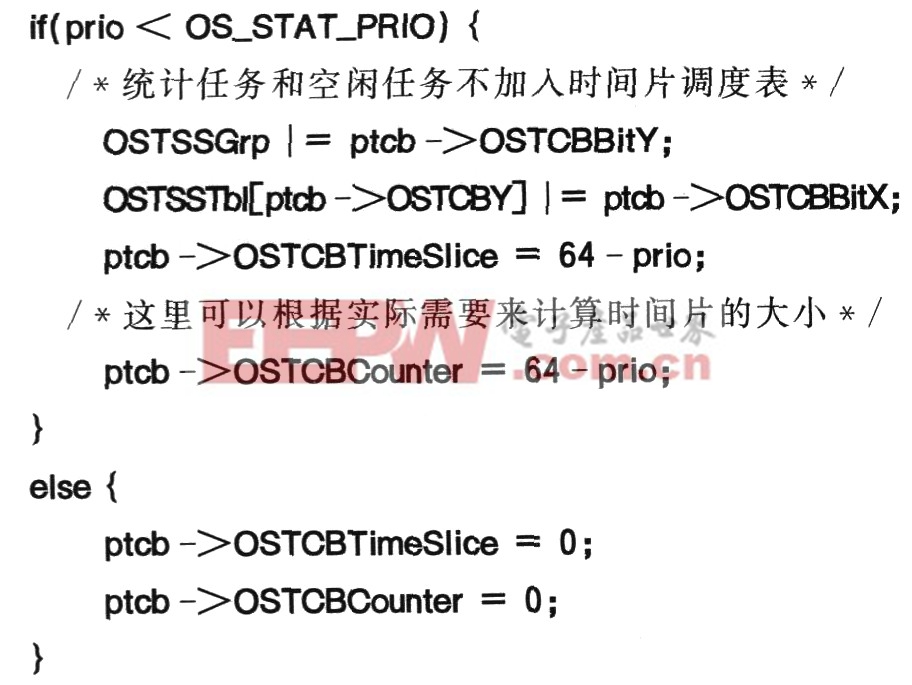
在初始化任务控制块的函数0S_TCBInit()中,笔者添加以下代码让新创建的任务处于时间片就绪表中,并根据任务优先级对任务的时间片大小进行初始化。本文引用地址:https://www.eepw.com.cn/article/188642.htm
0STimeTick()函数在每个时钟滴答被调用,在时间片调度过程中起到了递减时间片计数器的作用。当计数器为0时,进行任务切换或是重新给各个任务分配时间片并开始新一轮调度。
OSTimeDly()函数的作用是将任务延时一定的时间。这种情况下,应该把该任务从时间片调度表中清除。
当某个任务须等待一个事件的发生时,信号量、互斥型信号量、邮箱及消息队列会通过相应的PEND函数调用函数OS_EventTaskwait(),使当前任务从就绪任务表中脱离就绪态,此时还需把当前任务从时问片调度表中清除。笔者在OS_EventTaskWait()函数中添加了以下代码:
![]()
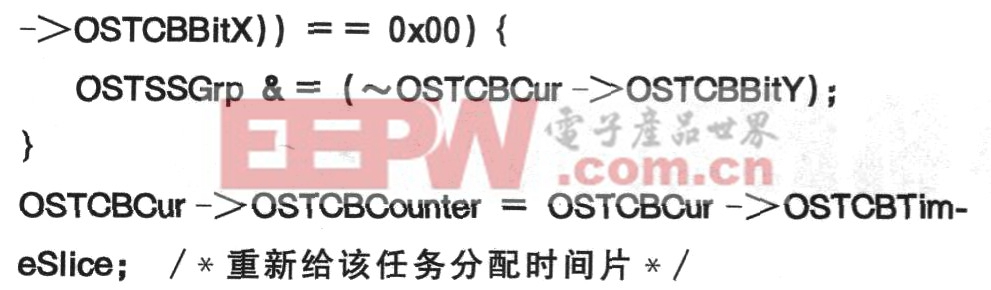
相应地,当某个事件发生了,信号量、互斥型信号量、邮箱及消息队列会通过相应的POST函数调用OS_Even―tTaskRdy(),从等待任务队列中使最高优先级任务脱离等待状态,此时还需要把该任务添加到时间片调度表中。笔者在0S_EventTaskRdy()函数中添加了以下代码:
OSTSSGrp |=bity;
OSTSSTbl[y]|=bitx;
3 应用实例
笔者首先把μC/0S―II移植到开发板上(MCU是意法半导体生产的基于ARM7TDMI核的STR730),然后如2小节所述对相关部分的源代码进行修改,接下来将优先级调度法和基于μC/0S―II的时间片调度法进行比较。为此分别建立了2个任务Task_TimeConsuming()、Task_Audio(),任务的优先级分别是5、6。
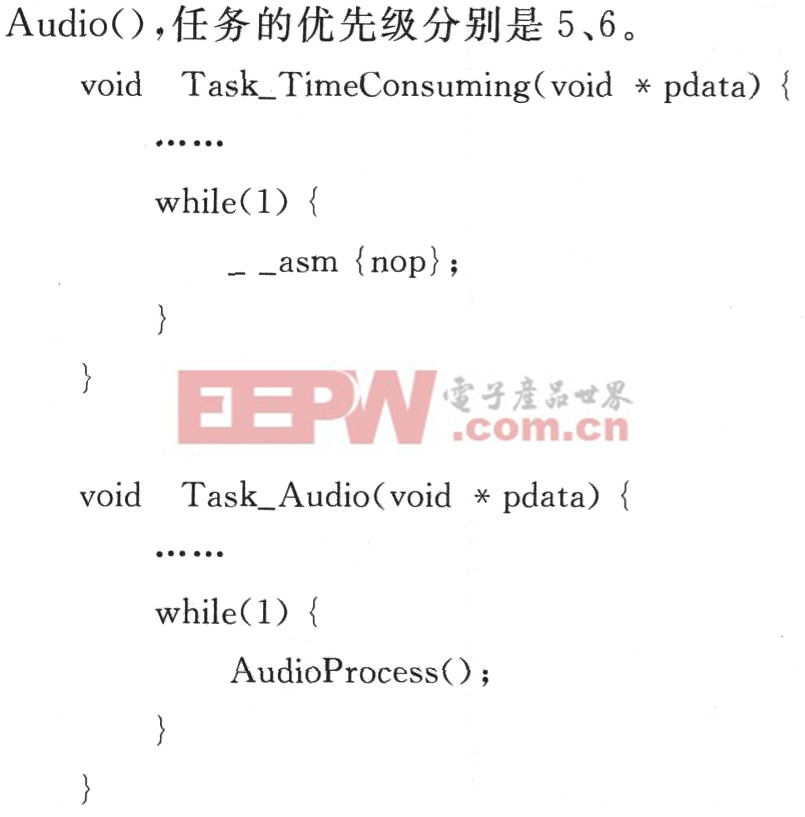
由于模拟的耗时任务Task_TimeConsuming()是个死循环且没有调用OSTimeDly()函数,其优先级又比Task_Audio()高,如果完全按照优先级调度,系统不会有声音输出,因为负责声音控制的任务Task_Audio一直得不到运行。而如果按照时间片调度(在os_cfg.h中增加#defineOS_TASK_TIME_SLICE_EN 1),则声音输出正常,通过仿真器在Task_Audio()中设置断点,程序会很快停止在断点处。进一步地,依次在Task_TimeConsuming()和Task_Audio()函数体中设置断点,分别记录两次PC指针停止在断点处时看门狗计数器的值WDG_Counterl和WDG_Counter2,可以利用WDG_Counter1和WDG_Counter2的差值估算出任务Task_Audio前后两次被调度的时间间隔(忽略任务在切换过程中的耗时)。经过多次计算,这个时间间隔值的范围在58~59 ms,而任务Task_TimeConsuming的时间片理论值=64一Prio=64―5=59 ms,实验值与理论值是非常吻合的。
当然,这只是简单的验证实验。严格的测试还需要兼顾信号量、互斥型信号量、邮箱及消息队列相应的PEND、POST函数以及0STimeDly()函数调用。鉴于篇幅关系,这里就不再赘述了。
结 语
笔者已经成功地把这种基于μC/0S―II的时间片调度法运用到车载信息娱乐系统的开发中。实践证明,对于含有耗时任务的系统,尤其是在需要严格控制耗时任务运行时间长度的场合,该调度算法会有一定的便捷性,也能保证系统的实时响应,而且整个算法只改动了μC/OS―II中的少量代码;还可以根据实际需要调整各个任务的时间片大小,体现出了算法的实用性与灵活性。



评论