瞄准器的眼跟踪算法研究

视线跟踪是图像实时处理的重要领域,广泛应用于军事领域的预警、火控、制导。视线跟踪又称眼睛瞄准系统或视觉跟踪系统,它用眼睛注视作为输入,并配上相应的硬件设备来表达思想及控制周围环境。另外还有“眼动鼠标”通过移动眼球控制电脑屏幕鼠标的运动,并且能利用眼睛的注视打开或关闭窗口程序,实验表明用视线跟踪控制要比鼠标迅速。
头盔瞄准器能够在尽可能大的范围内观察瞄准目标,而无需在发动攻击前才使飞机对准目标。从理论上讲,头盔瞄准器几乎具有全向视场,这是其他任何一种探测器都无法比拟的,而在实际应用中,头盔瞄准器的观察范围是由驾驶员头部转动所达到范围和头盔位置传感器跟踪测量范围共同决定,因此,头盔跟踪受跟踪范围和响应速度限制,而视线跟踪正好能扩大该范围。另外,随导弹离轴角的增加,头盔瞄准器观察目标和瞄准目标的范围要求也再增加,且要求在各种机动状态都能使用,眼跟踪和头跟踪正好解决了这个矛盾。
2 视线跟踪原理
以正视下的视线方向作为基准,改变视线方向,即眼球发生一定角度转动时,瞳孔中心位置同步移动,因此实时获取瞳孔中心位置坐标即可实现视线跟踪。
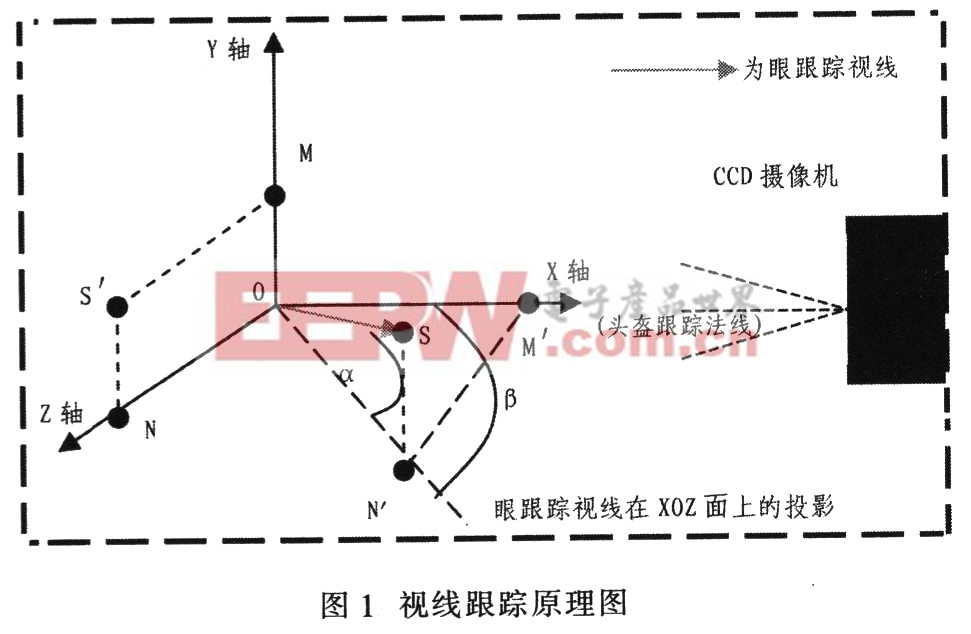
图1给出视线跟踪原理图。以眼底为坐标原点O,S为瞳孔中心位置,s’为S在YOZ面的投影,(M,N)为S’在YOZ面上二维坐标,CCD摄像机在X轴方向上。设定正视方向(即头盔跟踪法线方向)为X轴,头盔左右方向为Z轴,头盔上下方向为Y轴。根据瞳孔中心在ZOY面上的投影坐标及人眼球半径(约10 mm),得到俯仰角α(∠SON’)、方位角β(∠M’ON’)的值,这样就可确定眼跟踪视线方位。
3 跟踪算法实现
3.1 阈值选取
从内存读取红外源图像,图2(a)中,瞳孔与眼睛其他部分相比要暗得多,采用简单的二值化法分离瞳孔,提取瞳孔边缘。具体做法:先计算出整个眼睛图像的灰度直方图,第一个峰值对应的是瞳孔区域灰度值,如图2(b)中箭头所示。选择在第一个峰值的右侧相隔2至5个灰度值处提取瞳孔的二值化阈值,即灰度值为78,但这样会导致眼睫毛部分保留大量信息。图2(c)是采用阈值63二值化后的结果,可以看出,瞳孔被成功分离出来,虽然保留小部分睫毛,但不影响后续分析。

3.2 Sobel算子检测边缘
图像的边缘是图像最基本特征。所谓边缘就是指那些周围灰度有跳跃变化的像素集合。边缘广泛存在于物体与背景、物体与物体、基元与基元之间。Sobel算子是一种一阶微分算子,在边缘检测中应用广泛。Sobel算子有两个,其中, 是检测水平边缘的,而
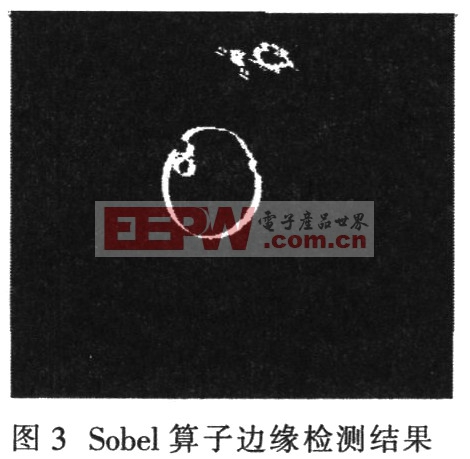
是检测水平边缘的,而 是检测垂直边缘的。在图2(c)中,瞳孔上的像素与其周围像素有明显阶跃变化。所以可利用该特性作为检测瞳孔边缘依据。利用Sobel算子检测瞳孔边缘结果,如图3所示。
是检测垂直边缘的。在图2(c)中,瞳孔上的像素与其周围像素有明显阶跃变化。所以可利用该特性作为检测瞳孔边缘依据。利用Sobel算子检测瞳孔边缘结果,如图3所示。

评论