基于USB接口的探地雷达数据采集系统

1 引 言
本文引用地址:https://www.eepw.com.cn/article/187532.htm探地雷达( ground penetrating radar,GPR)是一种新型的电磁探测设备,它具有快速、简便的对浅层目标和结构进行无损探测的特点,也是目前分辨率、效率最高的地下目标探测设备之一,因此被广泛的应用于城建、交通、地质、考古、国防等部门。在探地雷达的应用中,能否准确、高效地采集数据是探地雷达系统实用性和可靠性的判据之一。数据采集的准确性直接关系到探测目标的准确性和雷达数据的进一步处理工作;采集数据的速度关系到系统能否实现实时显示。所以,当雷达设备将采集数据传回主机时,就需要选择一种接口来实现数据准确、高速的传输。
传统的数据采集系统的数据传输接口在低速时常采用标准串行口或并行口,高速时一般采用PCI总线接口。它们存在如下缺点:虽然标准串行口或并行口应用开发比较简单,但是数据传输速率较低;PCI总线尽管数据传输速率比较快,但是硬件设计和驱动开发难度较大,PC I卡的尺寸面积限制了I/O接口的扩展;同时,这三者都不支持即插即用的功能。而USB接口规范1. 1中的12Mbp s的传输速率已经可以满足探地雷达数据采集系统的使用需求,其接口简单、便携,支持即插即用的优点又在很大程度上简化了系统的硬件设备,提高了雷达设备的可移动性。正是基于USB接口的这些优点,设计了基于USB接口的探地雷达数据采集系统,并开发了配套的应用软件,实现了探地雷达数据的采集、传输和实时显示。
2 系统组成与工作原理
2. 1 系统组成
探地雷达数据采集系统由两部分组成:计算机和数据采集卡。计算机作为采集系统的主控设备,实现对系统的控制和数据处理等功能;数据采集卡由模拟信号放大器、数控滤波器、时控增益放大器、高精度AD变换电路、F IFO、FT245 USB接口电路和时序控制电路组成,主要完成对取样电路输出信号的放大、滤波、采集等任务,并将采集数据通过USB接口传输到计算机内存中,供计算机处理和实时显示。系统组成框图如图1所示。
数据采集系统采用F IFO 设计数据传送通道,大大简化了系统的硬件电路和控制时序。在进行数据采集的同时,控制逻辑还将存储在RAM中的增益曲线数据周期性的送入DAC中,以实现时控增益放大。在数据采集卡中还设计了一个RS - 232 控制器,用于接收外部定位装置发送的定位信息。在探地雷达进行移动探测时,这个定位信息用于标示目标的地理位置。
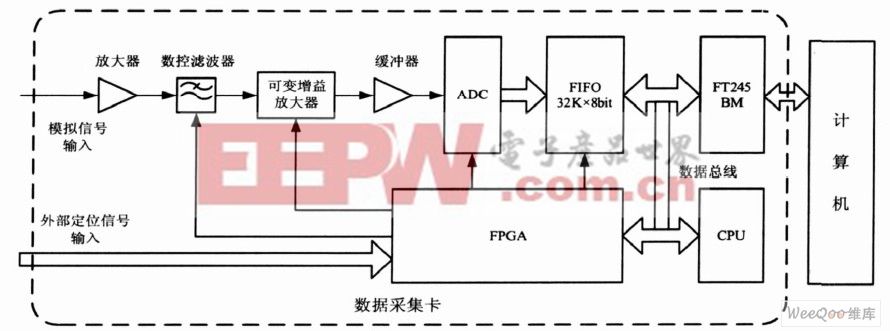
图1 探地雷达数据采集系统组成框图
2. 2 工作原理
探地雷达数据采集系统在工作时,首先通过打开计算机应用软件将雷达设备启动,然后将工作参数传送给数据采集卡,完成对雷达各项参数的控制。
命令被响应后,雷达开始正常工作。采集卡将采集到的数据经过采集控制和传输控制后传送给计算机。
数据采集控制:数据采集卡根据主机设置的参数采集雷达信号。首先将模拟信号进行预处理,预处理包括滤波处理和增益控制等,以去除模拟信号中的噪声,使模拟信号的幅度适于进行AD 转换。
然后进行AD 转换,对模拟信号采样,得到数字信号。数据采集卡在接收探地雷达传来的模拟视频信号的同时,还接收帧同步信号。数据采集卡将转换得到的A - scan (A - scan:探地雷达在一个测量位置探测获取的一维时域波形图)数据与帧同步数据混合,然后存入FIFO。
数据传输控制:计算机通过USB接口对数据采集卡进行访问,并读取F IFO 中的数据。计算机对数据采集卡的访问是通过查询方式完成的。数据采集卡内置的F IFO容量设计为32K ×9bit,如果计算机没有及时读走FIFO内的数据,F IFO就会出现溢出错误。所以查询的时间间隔要满足在该间隔内采集的数据不能大于F IFO的容量;另一方面,查询间隔太短,会加大计算机系统的负担,影响计算机进行数据处理的速度,所以要选取适当的查询间隔。以数据采集卡的最快采集速度为例进行计算: 每个scan的采样点数为1024,采样速率为512 scan / s,每一点的数据长度为2字节。这样在1 s内采集数据的大小为1024 ×2B ×512 = 1MB。在这样的采样率下,经32ms采集的数据就可将F IFO 装满,考虑到计算机系统的其它因素可能导致数据传输的阻碍,将查询间隔设为20ms。此时既可以满足数据传输的可靠性,又可节约计算机系统的资源。
3 系统的设计与实现
3. 1 硬件设计
与一般的通用数据采集卡不同,探地雷达数据采集系统的数据采集卡不仅要完成数据的采集,还需要根据探地雷达信号的特点,对模拟信号进行相应的预处理工作。
由于探测越深的目标,探地雷达接收的回波信号越小。为了提高对深层目标的分辨率,要采用时控增益放大器对取样电路输出的信号进行放大。对浅层目标反射的较强的回波信号,放大器具有较小的增益;对深层目标反射的较弱的回波信号,放大器具有较大的增益。由于探地雷达对地下目标进行重复扫描,所以放大器的增益曲线是与扫描频率同步的周期信号,也就是时间的函数,所以称为时控增益放大器。时控增益放大器的增益曲线通过计算机软件进行调节,可以为任意的曲线。这样就给使用者带来了很大的灵活性,实验中可以对感兴趣回波区域的放大增益进行调节以使目标更加明显。时控增益放大器由压控增益放大器、DAC和FPGA内部的RAM及控制电路组成。
由于不同的采样点数和扫描速度使得探地雷达接收机输出信号的有效带宽不同,为了提高信噪比,设计了模拟可控低通滤波以实现对不同带宽信号的低通滤波。该部分采用集成的开关电容滤波器设计,同时在FPGA中设计控制电路对该滤波器进行控制。最终实现了一个截止频率为0. 1 - 50KHz可变、8阶巴特沃思低通滤波器。
在USB芯片的选取上,选择了FTD I公司推出的FT245BM芯片。该芯片功能强大,传输速率快,能够实现USB协议与并行I/O协议之间的转换,并支持USB1. 1 及USB2. 0 规范,数据传输速率可达1MB /S。不论从芯片本身的功能,还是从系统开发的角度出发,该芯片都是探地雷达数据采集系统USB接口设计的理想选择。FT245BM片内128 字节的接收F IFO和384字节的发送F IFO使得芯片可以实现高速数据吞吐。当USB 外设向主机传输数据时,只需在芯片发送器的状态位为空时向设备写入一个字节宽度即可。如果发送FIFO 已满,设备将发送器的状态位设置为满以禁止数据写入,直到F IFO中有部分数据通过USB接口传输出去。当主机通过USB向外设传输数据时,设备将首先判断芯片接收器的状态位是否为满以确定是否可以接收数据,然后外设从主机读取数据直到接收器的状态位为满,表明已没有可以读取的数据。
3. 2 驱动程序设计
W indows系统下的USB驱动包括三层,从高到低依次是:USB客户端设备驱动(USB Client DeviceDriver) 、USB总线驱动(USB Hub (Bus) Driver) 、主机控制器驱动(Host ControllerDriver)。后两者由Windows系统提供,用户只需要开发USB 客户端设备驱动程序,FTD I公司提供了一个通用的驱动程序(General Purpose Driver) ,即FTD2XX. SYS。为了增强系统的通用性和可移植性,可以将设备驱动程序( FTD2XX. SYS)进行动态链接库函数封装,得到动态链接库FTD2XX. DLL,从而可以通过动态链接库直接访问驱动程序。驱动程序的结构如图2所示。
实现动态链接库对驱动程序的访问,首先调用FTD I公司提供的接口函数FT_Open ( )打开设备并获得驱动程序的句柄,然后调用FT_GetStatus ( )获得设备接收数据的长度、传输数据的长度和设备的当前状态,从而通过驱动程序得到设备输出缓冲区的信息。进而调用函数FT_Read ( )和FT_W rite ( )实现对设备的读写。当应用软件退出时,用FT_Close ( )关闭设备。










评论