寻北仪中力矩电流发生器的设计

摘要:针对挠性陀螺寻北仪控制力矩产生的需要,设计了力矩电流发生器。控制计算机解算得到的控制电流所对应的控制电压通过ADT800输出给压控恒流源,通过软件控制开关电路实现控制电流的精粗和极性转换,解决了系统对大范围、高精度控制电流的需求。实验测试表明,该电路工作稳定,能满足系统性能要求,可推广应用到其他惯性导航系统中。
关键词:寻北仪;挠性陀螺仪;力矩器;恒流源;开关电路
O 引言
寻北仪在军事和民用领域都有着广泛应用,它可测出载体纵轴与真北的夹角,用于为车辆、船舶等载体提供方位基准。力矩电流发生器作为寻北仪的重要组成部分,地位极其重要,其作用是将计算机输出的以数字量形式表示的方位和水平电流值转换成模拟电流,分别输入陀螺仪方位力矩器和水平力矩器,以产生找北力矩和阻尼力矩,使陀螺仪主轴跟踪地理子午面的运动。
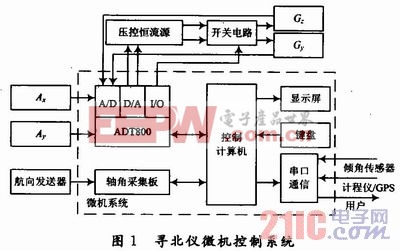
1 寻北仪微机控制系统
图1给出了寻北仪微机控制系统的示意图。控制计算机完成对主体仪器的检测和控制,同时负责显示、键盘等人机交互内容。控制计算机通过串口获取倾角传感器姿态、航向发送器航向、计程仪/GPS航速等信息,利用ADT800模块的A/D部分采集2路加速度计Az、Ay以及水平信号器Ey、方位信号器Ez等信息,定时解算控制电流并通过串口向其他设备发送航向信息。计算机解算得到的控制电流为数字形式,通过ADT800模块的D/A部分输出代表电流大小的电压信号,通过压控恒流源转换为电流输出,输入到主体仪器的陀螺力矩器中,使陀螺跟踪地理坐标系。
2 力矩电流发生器硬件电路
2.1 总体结构
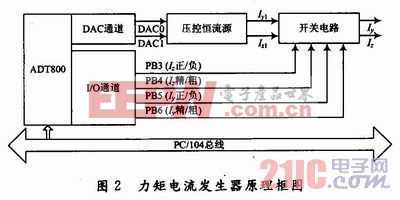
根据寻北仪总体要求,控制电流有两路,其中一路控制方位、一路控制水平,输出控制电流的最大值为80 mA,最小值为0.5 μA,电流精度要求优于O.5μA。如果不分档,要满足这样大的范围和高精度的要求,D/A转换的分辨率应为1 LSB=O.5×10-3/80=1/160 000(小于1/217而大于1/218),故需要18位的D/A转换芯片,并要求有关电路具有百万分之六的精度。为了降低对元器件的要求,将输出电流分为2档:取精电流的范围为O~1.25 mA;而粗电流的范围取为1.25~80 mA。分档后对精电流精度的误差要求为δ=O.5×10-3/1.25=O.000 4。若选取12位的D/A转换芯片,其分辨率为1LSB=1/212=0.000 244,可见能满足精度要求。为了进一步提高转换精度,采用电压控制的恒流源向负载(陀螺力矩器线圈)提供电流。由于电流是恒流源,故它不会受负载变化以及电源波动等因素影响,保证了转换精度。D/A输出的电压信号由计算机根据修正回路控制模型补偿各种寻北仪误差后解算控制输出。设计的力矩电流发生器原理框图如图2所示。










评论