一种基于滑模控制的新型Boost正弦波逆变器

1 引言
本文引用地址:https://www.eepw.com.cn/article/176513.htm逆变器是将直流变成交流的静止变流装置,我们把传统的电压源逆变器(VSI)称为Buck逆变器,是指瞬时平均输出电压低于直流输入电压,电路如图1所示。它已广泛应用到交流电动机驱动和不间断电源(UPS)系统中。因此,当需要输出电压高于输入电压时,必须在直流电源和逆变器之间加一个DC-DC变换器。如图2所示,涉及到功率和电压等级问题,这将导致逆变器体积增大、重量增加、价格升高和效率降低。
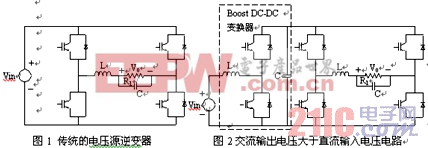
本文讨论一种新的电压源逆变器,称为Boost逆变器,它由两组对称boost电路组成,将产生一个比直流输入电压高的交流输出电压,并采用滑模控制策略,利用它对系统参变量的扰动和负载的变化都具有不敏感性,使系统具有良好的动态和稳态响应,从而获得平滑的正弦波输出电压。
2 新型逆变器的工作原理
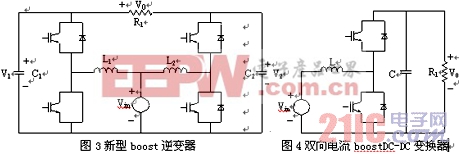
本文讨论的正弦波逆变器基本电路如图3所示,它是由两个boost DC-DC变换器组成,通过滑模控制,使每个DC-DC变换器各产生一个有相同直流偏置的单极性正弦波输出电压,而且两个输出电压在相位上相差180°。由于负载跨接在两个DC-DC变换器之间,所以,每个逆变器流过双向电流,对于其中一个DC-DC变换器,如图4所示。
根据参考文献[1]对boost电路的分析,用平均值的概念,我们可得到连续导通模式下的电压关系式
(1)
这里D是占空比。
由于两个DC-DC变换器相差180°,则可得到另一个DC-DC变换器输出电压的关系式:
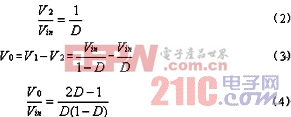
根据式⑷可获得如图5关系特性曲线图,从图中可见D=0.5时,输出电压特性为零,如果占空比围绕这个点变化,在输出端可获得正弦波电压。
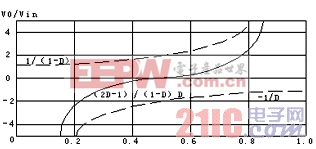
图5 boost逆变器输出特性
滑模变结构控制理论产生于五十年代,历经四十余年已发展成为一种完备的自动控制系统设计方法。它实质上是一种高频开关控制的状态反馈系统,由于滑模控制方案具有稳定性好、鲁棒性强和良好的动态性能以及控制容易实现等优点。滑模控制就是利用高速切换的开关控制,把受控非线性系统的状态轨迹引向一预先指定的状态平均空间平面(滑模面)上,随后系统的状态轨迹就限定在这个平面上,因此,一个滑模控制系统的设计为两个方面:首先是寻求滑模面函数,使控制系统在滑模面上的运动渐趋稳定且品质良好;其次是设计变结构控制,使系统可由相空间的任一点于有限时间内到达滑模面,从而在滑模面上形成滑模控制区。
由于本逆变器由两组对称boost DC-DC电路组成,并具有独立性。下面仅对一个双向DC-DC变换器(图4所示)的控制进行分析,控制框图如图5所示。工作过程如图6所示,当开关S1闭合时S2打开,iL1线性增加,二极管处于反向偏置,电容C1通过负载放电,V1电压降低;当S1打开时S2闭合,iL1流过电容C1和输出端,iL1减少而电容C1充电。
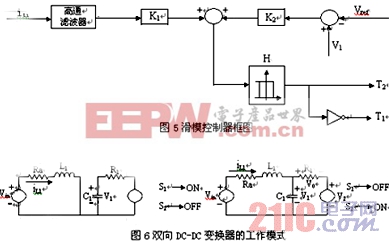
由变量iL1和V1表示的等效状态空间模型电路如下:
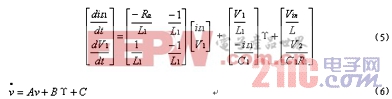
式中Υ开关状态, 状态变量误差。定义Υ为

(7)
为获得较好的输出电压瞬态响应,以状态变量偏差(根据参考变量的差定义)的线性组合来表示状态空间的滑动平面方程由(5)式给出
S(iL1,V1)=k1ε1+k2ε2=0 (8)
这里系数k1和k2是增益,ε1是输出电压偏差,ε2是输出电流偏差,可表示为式(6)、式(7):
ε1=i1-iLref (9)
ε2=V1-Vref (10)
S(iL1,V1)=k1(i1-iLref)+k2(V1-Vref) (11)
信号S(x)通过一个滞环比较器产生开关管的控制信号,通过闭环控制,使得变量S(x)根据变结构理论,变换器方程可改写为:
式中x为状态变量误差,
把(13)代入(11)中,可得如下等式:





评论