双步进电机同轴联接及驱动装置的设计
3 硬件软件设计实例
3.1 硬件设计
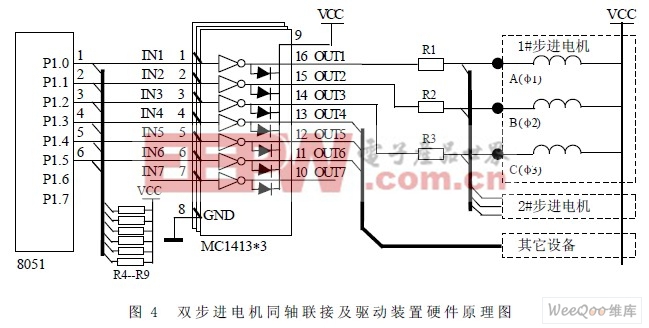
图4 为双步进电机同轴联接及驱动的硬件原理图。8051 的P1.0、P1.1、P1.2、口输出控制步进 电机的脉冲信号,分别对应连接到三片层叠并联的1413IC 的IN1、IN2、IN3,通过反相驱动,OUT1、 OUT2、OUT3 分别对应连接到1#、2#步进电机的 φ1、φ2、φ3,实现对双步进电机的驱动。
本例中步进电机的每相额定电流为0.2A,则两个步进电机的相额定电流为: 0.2A×2=0.4A (1)
由相关资料查得MC1413 反相驱动器每级的最大电流为0.5A。
由于驱动器在使用时不能长时间 工作在最大驱动电流状态,故选同时驱动两个步进电机的相额定驱动电流为: 0.2A×2×2=0.8A (2)
由上式(2)可知,一片MC1413 反相驱动器(每级的最大电流为0.5A<0.8A)不能满足对双步进 电机同时驱动的要求,为了满足上述要求并留有较大余地,故采用三片1413IC 层叠并联。
MC1413 IC 中的二极管起到对步进电机线圈中的反电势的释放作用,以保护步进电机和驱动器IC 不受损坏。 R1--R3 为限流电阻,R4--R9 为上拉电阻。
3.2 软件设计
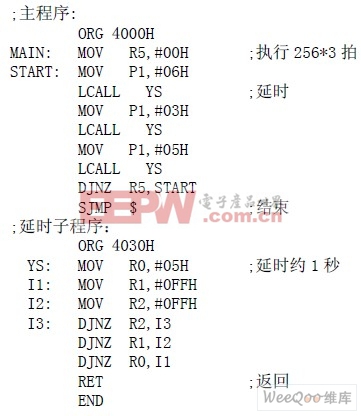
下述程序采用MCS-51 汇编语言程序实现对两个同轴联接步进电机(双端轴)的控制,程序启动后 步进电机旋转 256*3 拍(768 步)停止。程序如下:
由表1 可知,对于单端轴同轴联接双步进电机的控制,其软件控制程序不变,只需将其中一个 步进电机的B(φ2)、C(φ3) 相进行相互对调。
5 结束语
该项设计已获国家专利,并已成功的应用于步进电机遥控示教仪和单片机控制的仿真电梯中, 取得了很好的效果。该项技术也可推广到三个以上的多步进电机同轴联接及驱动中去。当一台最大 功率的步进电机仍不能满足所要求的转矩和驱动功率时,该项创新技术的优点更为突出。













评论