伺服控制系统的硬件设计

在显微镜伺服系统中,硬件主要由电动机驱动控制系统、显微镜光源自动控制系统与分布式监控网络系统三部分组成。为了保证所有的控制系统既可单独工作,又可同时工作的要求,采用了多单片机组成的分布式通信网络,通过RS-232通信接口,直接接受PC的统一管理。考虑到成本问题,选用了性价比很高的AT89C2051单片机I/O端口及可以在PC上进行通信的UART通信端口。
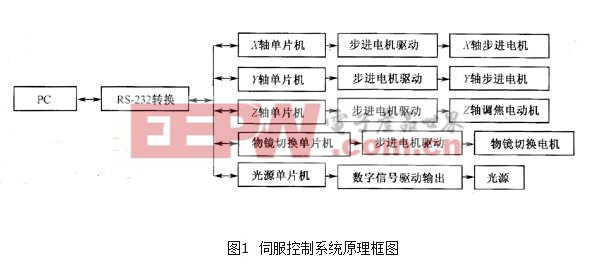
本文引用地址:https://www.eepw.com.cn/article/167613.htm在电机驱动控制系统中,用四个步进电动机分别控制显微镜载物台在X轴和y轴方向上的平面运动,在Z轴方向上的调焦运动与物镜的选择切换。每一个步进电动机用一个AT89C⒛51单片机来单独管理其运行状态及移动的位置,其驱动环节电路框图如图1所示。和y轴两个方向上的开环位移进行控制;可通过计算机图像的灰度值闭环控制物镜的上下移动,以实现自动调焦;物镜转换器可自动切换;通过载物台在X轴和y轴两个方向上的二维移动,再加上在Z轴方向上的实时自动跟踪调焦,可实现对观察物(切片或培养皿)进行实时扫描,使整个观察过程能显示出清晰的图像;通过预先设定载物台的运动规则,使显微镜能按程序观察到规定的视场;通过快速接近(相当于粗调)或精细调节(相当于微调)两种方式可自动精确调焦和自动跟踪调焦(调焦精度小于0.5 gm);单片机控制电路和计数脉冲及在X轴和y轴两方向上的重复定位精度(±0.02 mm)能满足医学临床检验的需要;可联网进行远程遥控显微镜,以利于医学学术交流或教学交流。
伺服控制系统的原理框图如图1所示,图中的虚线框是显微镜的伺服控制系统,它通过分布式微控制器系统网络来驱动显微镜平台的精确运动,具有自动精确调焦和自动跟踪调焦的功能。
由CCD采集到的图像经图像采集卡送入计算机,PC根据算法分析当前图像的清晰度。若图像不是最清晰的,则PC通过RS-232通信端口发送调焦命令送给微控制器系统,微控制器系统把相应的控制信号传送给Z轴调焦电机,由Z轴调焦电动机推动调焦机构做相应的运动,从而改变图像的清晰度。如此反复的由PC与伺服系统共同作用,直至找到图像最清晰的位置为止,从而完成自动精确调焦的全过程。由PC发送命令,通过控制x轴和y轴步进电机的运动可改变观察视场。在改变视场的过程中,PC自动跟踪图像的清晰度,以保证物镜处于最佳成像位置。








评论