基于有限状态机的飞行器自毁系统时序控制设计
因此该设计采用状态作为输出信号且带有复位信号的Moore型有限状态机。其结构框图如图4所示。本文引用地址:http://www.eepw.com.cn/article/163781.htm

3 QuartusⅡ环境下有限状态机的设计
3.1 系统总体结构
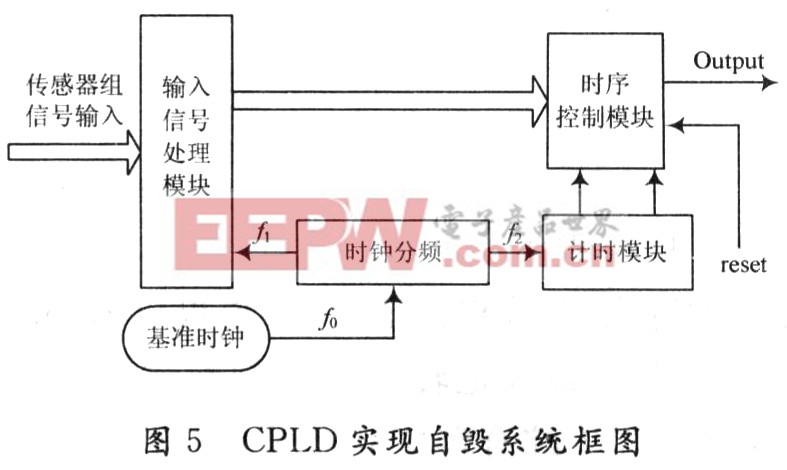
飞行器自毁系统在飞行器起飞后开始工作,并实时监控飞行参数传感器组及计时模块产生的控制信号。图5给出了自毁控制电路的硬件实现方案。在CPLD中实现系统的总体结构如图5所示。CPLD外围的高性能运算放大器为主要元件的模拟电路以及传感器组用来产生时序控制信号(c1,c2,c3,c4,c5),并输入到输入信号处理模块。时钟分频用来产生各个模块工作所需的时钟。计时模块用来产生飞行总时间(tmax)。时序控制模块用来产生自毁输出信号(Output),它是整个系统的控制核心,它的可靠性和稳定性是飞行器能否实现可靠自毁的基础。这里采用状态作为输出信号且带有复位信号的Moore型有限状态机设计时序控制模块实现飞行器可靠自毁。
3.2 改进型有限状态机实现时序控制
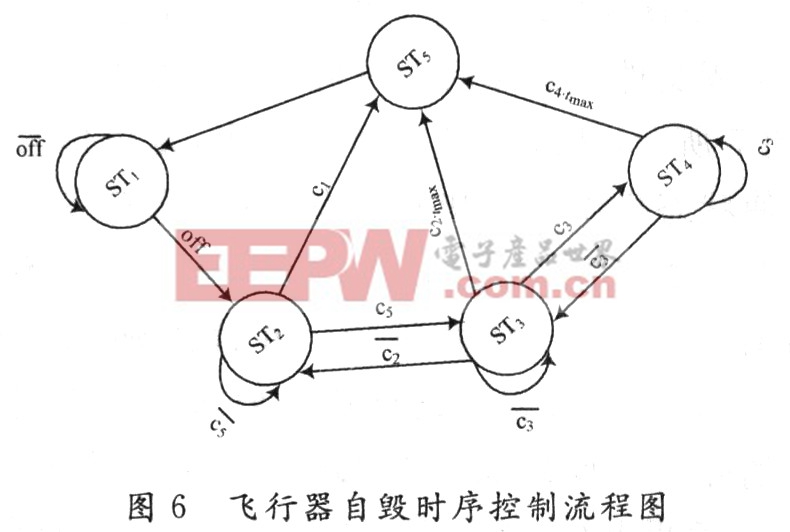
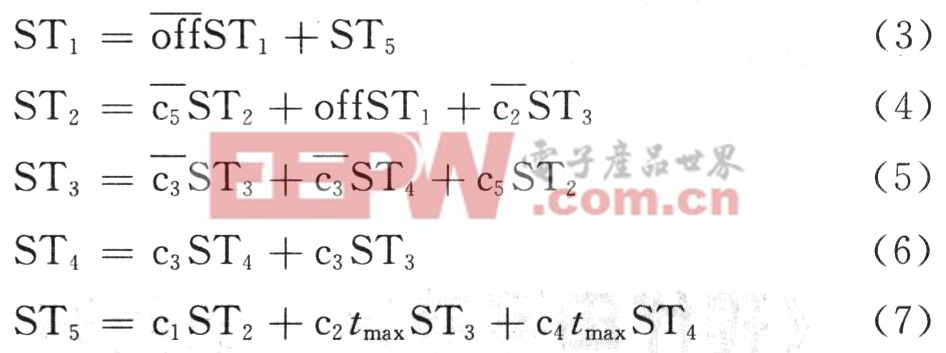
飞行器自毁时序控制流程图如图6所示。飞行器自毁系统的时序状态变化由各个传感器的输入及CPLD计时器状态决定。飞行参数传感器组输入不同的状态指令,时序控制系统就可以在不同的状态间变化,其中ST5状态是整个自毁系统的控制输出。根据图6可以得到5个状态触发器的激励方程:















评论