双目三维定位的视频运动 检测控制系统设计
3 DSP的软件系统设计
3.1 双目视觉算法
本文所采用的摄像机的空间关系如图4所示。假设C1与C2摄像机的焦距相等,各内部参数也相等,且2个摄像机的光轴平行,x轴重合。由于光轴与图像平面垂直,故2个摄像机的图像坐标系x轴重合,y轴平行。因此,将第1个摄像机沿其z轴平移一段距离后与第2个摄像机完全重合。

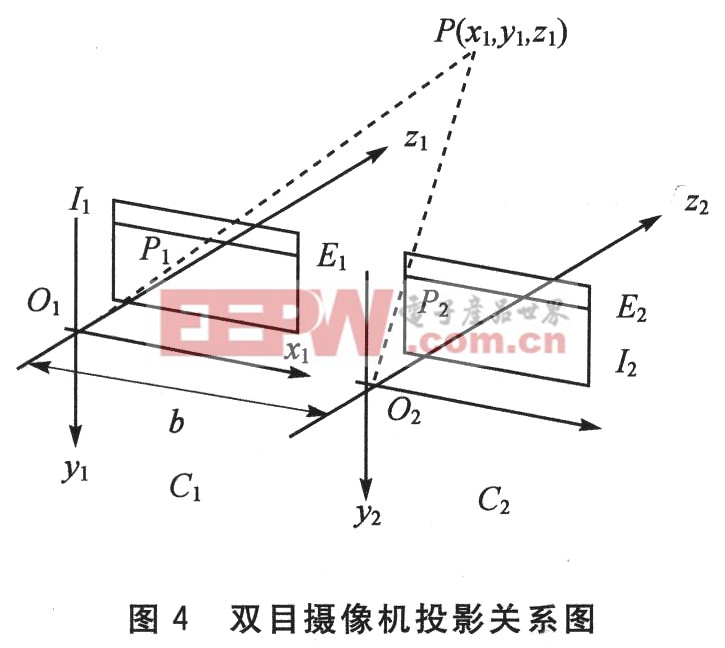
当双摄像机这样配置时,2个摄像机坐标系只相差x轴方向上的1个平移,将平移距离1记为b。
如图4所示,O1O2为C1及C2坐标的x轴。PO1O2平面与2个图像平面I1及I2的交线分别为E1和E2。由于2个图像平面位于同一平面,则E1与 E2为该平面上的同一直线。又由于图像平面平行于x轴,故E1和E2与x轴平行。P1和P2分别为O1P与I1,及O2P与I2的交点,则P1与P2分别在E1和E2上。事实上,一幅图像上的任一点,在另一幅图像上的对应点只可能位于1条特定的被称为极线的直线上,而E1和E2就是此系统的2条极线。
















评论