基于NiosII的光栅细分电路系统设计
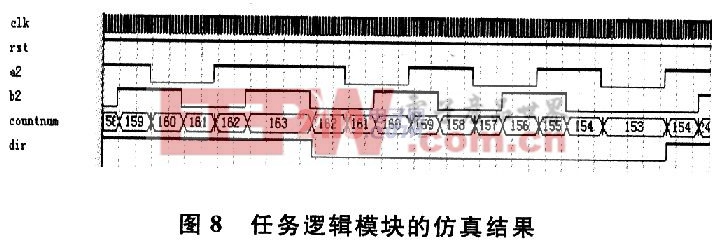
任务逻辑设计是自定义组件设计过程中最重要的部分,主要实现插值芯片输出正交信号的四细分,同时更新Countnum_reg和Dir_reg的值。如图7所示,正交信号A2/B2的相位关系随着光栅位移传感器运动方向的不同而改变。当光栅读数头正向移动时,A2相信号超前于B2相信号90°,A2/B2两信号的电平变化规律为OO→10→11→01→00。当光栅读数头反向移动时,A2相信号滞后于B2相信号90°,A2/B2两信号的电平变化规律为00→01→ll→10→00。这样,就可以通过判断电平之间的状态变化来决定是否对计数器进行操作。当状态变化为00→10→11 →01→00时,对Countnum_reg进行加1操作,并将Dir_reg置1;而当变化为00→01→ll→10→OO时,则对Countnum_reg进行减1操作并将Dir_-reg置0。若状态保持不变,则计数器和方向值保持不变。其余状态之间的变化,规定为无效。
上述的4个状态之间的转移可以通过设计有限状态机来实现。系统主时钟clk选用50 MHz,能够保证正确采样状态之间的变化。该有限状态机由5个状态组成,它们分别是idle、00、01、l1、10。采用one―hot的编码方式,可以有效地避免竞争冒险现象,提高抗干扰能力。其综合生成的电路无论是在效率还是稳定性方面都能够满足设计要求。任务逻辑模块的仿真结果如图8所示。本文引用地址:http://www.eepw.com.cn/article/163018.htm
若记录相邻两次Countnum_reg的差值,便可通过以下的公式计算光栅读数头移动的距离:

式中:N为插值芯片的插值因子,d为光栅栅距。
4.3 二次细分测速组件设计
光栅读数头的移动速度应在一定范围之内,否则会造成丢数等误差。测速组件主要对读数头的移动速度进行实时监控,从而实现过速报警。其设计过程与二次细分辨向组件类似。移动速度的计算公式如下:
式中:d为光栅栅距,f为插值芯片输出正交信号的频率,
N为插值芯片的插值因子,n为t时间内正交信号的个数。由此可知,只要测出频率f即可求得移动速度。
寄存器描述文件中定义了4个寄存器,如表1所列。

任务逻辑设计采用测周期的方法,即根据Div_reg中的分频因子对待测信号tclk进行分频,在分频后信号的高电平内记录标准信号sclk的个数,并在其下降沿将计数值存到COUnt_reg中。同时,在其低电平内将Countready_reg置1,通知AVaIon主设备计数值已就绪。待测频率的计算公式如下:

该方法可能会产生±1个标准脉冲的测量误差,由于系统标准频率与待测正交信号相比为高频信号,因此能实现高精度的频率测量。
4.4 LCD控制组件的设计
本系统中使用的LCD为128×64的点阵黑白屏,其内嵌控制器为KS0107/KS0108。该液晶模块的D/I引脚用于指示模块处理数据/命令;R/W引脚控制读/写操作;EN引脚为使能信号,CSl/CS2为屏幕的左右半屏控制器片选信号。
本系统在NiosII IDE开发环境中设计应用程序,其程序流程如图9所示。

5 结论
①与传统的分立元件细分电路相比,本系统中使用了专用的插值芯片IC―NV,不但提高了系统集成度,而且在简化PCB设计的同时提高了细分数。NiosII嵌入式处理器使用,既提高了系统性能,又降低了费用。利用Component Editor工具设计的二次细分辨向模块、测速模块及LCD控制模块,可以随时根据需要更改驱动程序并可重复利用,实现了系统的集成和模块化。
②仿真结果表明,该系统设计简单灵活,稳定性高,实时性强,可通过调节插值芯片的插值数实现高达64倍的细分。

DIY机械键盘相关社区:机械键盘DIY











评论