基于T-S模型的旋转式起重机稳钩保性能控制

摘要:基于T-S模型的保性能控制对控制带有不确定性系统(如旋转式起重机稳钩系统)有很好的鲁棒性,把系统可稳和保性能控制转化为解一系列矩阵不等式(LMI)的问题,得出最优的反馈矩阵,设计出基于T-S模型的最优保性能控制器,并对这种方法进行了仿真。结果表明,这种方法简单可行,并且具有很好的鲁棒性。
关键词:旋转式起重机稳钩;T-S模型;保性能控制;鲁棒性
0 引言
近年来,随着货物运输方式的飞速发展,旋转式起重机稳钩技术越来越得到人们的重视,它直接决定了的装卸速度。Y.Kijima等人利用模糊控制与遗传算法相结合来优化模糊控制规则的系数;刘殿同等用遗传算法优化模糊控制器参数的方法和滑模变结构方法来对旋转式起重机稳钩进行控制;Amel Ouezri等人采用了神经网络来优化模型控制器隶属度和规则的方法,上述三种方法计算复杂,且都把旋转式起重机作为确定系统来研究,鲁棒性不强,Dal-Young Ha使用TSK模糊控制器简化了系统的输入输出表达,KunihitoMatsuki利用H∞控制理论来对误差与参数变化进行控制,这两种方法有一定的鲁棒性。但这些方法都把旋转式起重机作为一个确定的系统来研究,并且有各自的缺点。
旋转式起重机很复杂,由于货物的不确定性和绳长的挠性等特点,以及在控制系统的运行过程中还会出现风载荷的变化、元件老化等问题,所以旋转式起重机的模型是一个不确定非线性二阶系统,因此需要由基于T-S模型的保性能控制这样鲁棒性很强的方法来进行控制。
这种方法不但能使系统稳定,还可以使系统保住一些性能,使得在外界变化和内部结构发生变化时系统的参数变化不至于过快。
1 问题的描述
所要研究的对象为起升的起吊系统,在系统局部信息或专家经验存在的条件下,像旋转式起重机这样的不确定非线性连续系统可以采用具有不确定参数的T-S模糊模型:
为货物偏摆角的变化;为货物偏摆角的加速度;为变幅时的加速度。取状态向量为:
![]()
则有如下的状态方程:
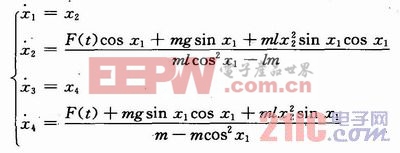
这是一个非线性状态方程,非线性系统的分析和控制仍然是很困难的,尚缺乏统一有效的方法。为此,基于多模型处理的思想,采用基于T-S模型的模糊控制方法来设计控制器,由于T-S模型的后件是线性的,线性系统中很多成熟的理论可以加以利用,而且与其他模糊推理相比,其计算效率(线性函数和常值函数易于计算)、推理速度快。为了运用线性系统理论和模糊控制中的T-S模型进行控制器的分析和设计,可以考虑将其先进行局部线性化,使之成为若干子系统,再将这若干子系统进行模糊综合。该模糊建模方法的本质在于将一个整体非线性的动力学模型用多个局部线性模型进行模糊逼近。







评论