高精度超声倒车雷达的设计
3.2 扇形扫描探测的优点
首先,系统使用小波束角超声传感器进行测距,测距的指向性更加优越;并且,由于系统选用的传感器的有效扫描角度为10°(5°×2,波束角内的范围),而步进电机每一次只转动7.2°的角度,所以探测范围内的每一个区域都会被重复探测,不会出现障碍物被遗漏的情况,消除了探测盲区的存在。
此外,由于系统只使用了一套单独的超声测距系统,所以在进行测距工作时不存在传感器之间相互干扰的问题,系统性能更加稳定,结果也更加可靠。
3.3 扇形扫描探测方法的效果
扇形扫描的探测方法将所需探测的区域划分成一定数量的较小区域逐个探测。这样的方法极大地提高了扫描的准确度,不仅获得了障碍物的距离信息,也获得了较为准确的方向信息。以泊车过程中通常会遇到的方形、圆形、尖角这类障碍物为例,在不同距离上,扫描效果如图4所示。
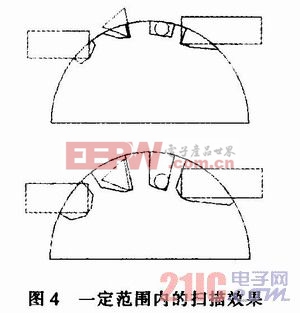
虽然探测结果相较于障碍物的实际情况仍有较大差别,但已经比较确切地反映了障碍物的实际分布情况。依据这样的探测结果,可以为驾驶员提供更加直观明确的参考信息,极大地提高了泊车的安全性。
3.4 时效性分析
使用扇形扫描的探测方法,需要在21个不同的方向上逐个进行距离探测,相比于以往的设计来说,这样的探测方法耗费的时间要长很多。但是对于倒车雷达系统来说,由于泊车时的探测距离不会超过3 m,进行21次测距所需的时间也在几秒钟之内,并且倒车时的车速很慢,所以不会影响正常的倒车行驶。
4 结论
在倒车雷达的设计中使用扇形扫描的探测方法,不仅能够更加准确地探知环境中存在的障碍物的具体方位,更真实确切地反映泊车环境的实际情况,而且消除了以往设计中普遍存在的探测盲区。实验证明,其探测的准确度至少是传统倒车雷达的6倍以上。这样的设计能够给驾驶员提供更加直观可靠的参考信息,极大地提高了泊车的安全性。













评论