高精度超声倒车雷达的设计
波束角的大小,代表着超声传感器有效探测范围的大小。因为在传感器有效探测范围以外,声波能量过于分散,无法产生有效的回声,也就无法测出相应的距离。所以,超声波测距装置通常只能够探测到处在其传感器波束角范围内的物体的距离。
在相同环境下,由于超声波测距系统测距的依据只有回波时间这一项,所以在系统的有效探测范围内,以超声传感器为圆心,处于同一圆弧上的物体,都会产生相同的回波时间,都会得到相同的测距结果。这就是说,使用超声系统测距测得的距离并不一定是传感器正前方的物体的距离。超声波测距,只能测得被测物体的距离,却无法确定产生该距离的物体的确切方向,也不能确定产生该距离的被测物是否只有一个。测距系统选用的传感器波束角越大,被测物体的具体方位就越不确定,测距的指向性也就越差。指向性不足是超声波测距最大的缺点。
2 以往设计方法的缺陷
以往的超声倒车雷达设计,均采用了多个超声传感器均匀阵列的探测方式。并且要求所有传感器的探测范围之和,能够覆盖车体后部的全部区域,以保证能够全面探测泊车环境。
由于超声测距系统的指向性与探测范围成反比,所以如果要求系统能够更精确地测得障碍物的位置,就必须使用数量较多的小波束角传感器密集阵列。但是这样的方法成本较高,并且影响车辆美观,更重要的是如果传感器密集阵列相互之间还可能会造成干扰,影响探测的可靠性。所以目前的倒车雷达系统大多牺牲了测量的准确性,而选用3~4个探测范围较大的大波束角超声传感器阵列探测。
这样的设计方法只能够探知障碍物的存在,却无法明确障碍物的具体方位。并且,这样的探测方法也仍旧存在着一定的盲区。如图2所示,在距离车尾较近的位置,如果出现体积较小的障碍物位于两个传感器之间,就很可能会被系统漏测。这是由超声测距系统自身的特性决定的,无法克服。本文引用地址:http://www.eepw.com.cn/article/161474.htm
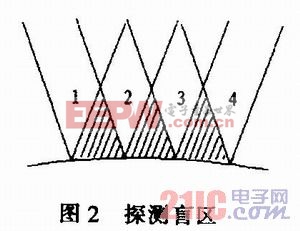
图中标号区与为各传感器有效探测范围,阴影部分即为相邻传感器探测区域之间的探测盲区。
3 扇形扫描探测方法
为了克服超声测距系统指向性差且存在探测盲区的缺点,设计中使用了通过步进电机驱动单套小波束角传感器,做扇形扫描探测的方法。
3.1 扇形扫描探测方法
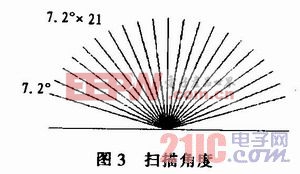
在设计中,使用步距角为7.2°的步进电机,驱动波束角为5°的超声传感器。在每一轮扫描中,电机步进20步,扫描车辆正前方左右共144°的范围。这样,从起始位置开始,超声传感器总共会在21个不同的角度上进行测距。步进电机每步进一个角度,测距系统就在当前的角度上测得一个距离信息,结合当前的扫描角度,就会得到一个较为精确的,包含距离、方向两方面内容的位置信息。每完成一轮扫描,就会得到21个连续的位置信息。依据这些信息,就能够较为精确地判断障碍物的具体方位,得知相对准确的泊车环境。扫描角度如图3所示。













评论