基于GPS15xL-W塔钟控制系统的研究

摘要:针对传统塔钟走时存在累积误差的缺点,提出一种基于GPS15xL-W的塔钟控制系统,采用89C54RD+单片机作为主控芯片,介绍了系统的硬件电路和工作原理,并给出了相应的软件设计方法,实现了塔钟控制系统自动校时功能,从而消除了塔钟控制系统走时的累积误差,保证塔钟控制系统走时的高精度。研究结果表明:该系统运行可靠,具有很好的实用性。
关键词:GPS;自动校时;自动追时;单片机;累积误差
随着城市建设的快速发展,建筑物上的塔钟越来越多。目前实现塔钟自动校时的方式主要有3种:(1)利用收音机接收的报时信号进行校时;(2)利用电视机接收的电视信号进行校时;(3)利用短波接收机接收陕西天文台的短波授时信号进行校时。然而这3种校时方式所采用的校时信号极易受到外界干扰,可能导致长时间分离不出有效的校时信号。解决这一问题的最好办法就是采用全球定位系统。近年来,随着电子技术的发展,GPS接收机的造价愈来愈低,而且接收的卫星信号准确可靠不易受外界环境干扰,而且其安装不受地域的限制,一般装有塔钟的地方均可安装,完全满足了塔钟控制系统的使用要求。本文介绍了基于GPS15xL-W的塔钟控制系统。
1 GPS授时原理
GPS(Global Positioning System全球定位系统)是美国于1994年全面建成,集卫星导航、定位和定时于一体的多功能系统。GPS系统主要由三部分组成:空间部分、地面控制系统部分、用户设备部分。空间部分由21颗工作卫星和3颗在轨备用卫星组成,均匀分布在6个轨道面上,使得在全球任何地方、任何时间都可观测到4颗以上的卫星,并能在卫星中预存导航信息。GPS卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算可求出接收机的三维位置、三维方向、运动速度以及时间信息。本系统中获知时间信息即可。
若设接收机的位置为(X,Y,Z),已知卫星的位置为(Xn,Yn,Zn),其中n=1,2,3,4,则解以下4个方程便可计算出接收机的位置(X,Y,Z)和标准时间T。
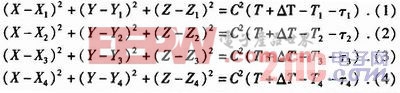
式中,C-光速;△T-用户时钟与GPS主时钟标准时间的时差;Tn-卫星n发射信号的发射时间;τn-卫星n上的原子钟与GPS主时钟标准时间的时差。
用户利用GPS接收机就能全天候、实时、连续不断地接收到其发出的信号,通过对接收的信号进行解码和处理,从而获取精确的时间信息,包括1PPS,即秒脉冲信息,其脉冲前沿与国际标准时间(格林威治时间,UTC)的同步误差不超过1μs,以及经RS232串口输出的与秒脉冲前沿相对应的UTC时间。
2 硬件设计
2.1 系统硬件电路构成
本系统主要由以下几部分组成:单片机控制系统(89C54RD+)、步进电机驱动电路、GPS接收电路、电源电路、调节控制键盘电路、显示电路、报时电路,如图1所示。

系统中的塔钟由步进电机带动走时,STC89C54RD+以GPS时间信息为基准,输出步进电机的控制信号。GPS接收机选取美国GARMIN的产品GPS15xL-W模块,该GPS接受模块体积小,功耗低,授时精度可达±50 ns(典型值),可以输出两种时间信号,一种是间隔为1 s的同步脉冲信号1PPS,其脉冲前沿与UTC的同步误差不超过1μs,另一种为包含在串口输出信息的与1PPS秒脉冲相对应的UTC绝对时间。主控器采用宏晶公司的STC89C54RD+增强型51单片机,通过MAX232电平转换芯片与GPS15xL-W连接,获得接收机接收的时间信息,作为塔钟的时基信号源,送入单片机的RXD端,单片机的P1.0—P1.3设计为输出端,提供步进电机的步进脉冲信号、方向控制信号以及脱机使能信号。














评论