基于模糊控制的高灵敏GPS接收机设计
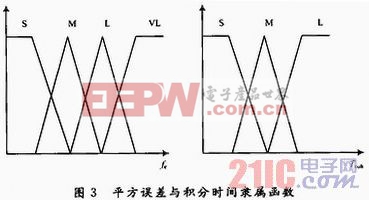
频率跟踪误差设定在零和系统所容忍的最大频差之间,相应地隶属于4个三角函数:小(S)、中(M)、大(L)和很大(VL)。对于模糊积分时间,定义3个三角函数:大(L)、中(M)和小(S),覆盖了积分时间的整个范围。其中,模糊积分时间的小(S)用来处理信号从捕获阶段进入跟踪阶段后,使跟踪误差迅速减小,而中(M)和大(L)对应噪声带宽较窄的跟踪阶段。如图3所示。本文引用地址:http://www.eepw.com.cn/article/160305.htm
ELSE规则的存在不仅确保了至少有一个规则能得到满足,从而使得在任何输入数据条件下都能成功地执行推理机制,而且减少了计算量。ELSE规则的引入相当于强制性地对积分时间进行修正,类似于一般变步长自适应算法中引入附加常数和初始步长序列的自适应状态作用,它同样受收敛速度和失调之间存在着相互矛盾的约束。为了获得一个更小的失调和更快的收敛速度,必须选择合理的ELSE规则。如希望收敛速度快,可以将小(S)语义项赋给ELSE规则。反之,将大(L)语义项赋给ELSE规则以获得小的失调。算法的精度受到收敛速度和失调这两个相互矛盾的影响,这个问题通常在实践中按照实际需要协调收敛速度与失调指标来达到相关指标。当接收机信号通道从捕获阶段进入跟踪阶段后,先让环路采用牵引滤波,让其运行相对较短的积分时间,使跟踪误差迅速减小。然后环路再转而采用噪声带宽较窄的跟踪滤波。在不同的接收环境中通过采用此模糊控制算法,自适应调节环路参数,达到频率误差容忍度与环路噪声的最佳匹配,从而实现接收机系统灵敏度的提高。
3 性能仿真与分析
3.1 数学模型
针对非相干积分值V含有均值不为零的噪声情况,将信号的信噪比SNRSQ定义为:
SNRSQ=[E(V)-E(Vn)]2/V(Vn) (10)
式中:Vn为式(9)中的非相干积分值V在信号不存在情况下的值;分母V(Vn)则代表Vn的方差。Vn的概率密度呈瑞利分布,V的概率密度为莱斯分布。给定自相关幅值P以及噪声nI和nQ的方差![]() ,那么非相干积分平方前的信噪比SNRcoh为:
,那么非相干积分平方前的信噪比SNRcoh为:
![]()
平方损耗LSQ就可以表示为LSQ=SNRcoh-SNRSQ。系统采用非相干解调时,总的误码率可表示为:![]() 为信噪比。
为信噪比。
3.2 仿真结果与性能分析
仿真中的数据信号采用6级gold序列,环境噪声是方差为1的加性高斯白噪声。各种信号跟踪环路均存在用信噪比或者误码率来衡量跟踪灵敏度门限值,而观察信噪比的大小判断接收机是否正在良好地跟踪真实卫星信号的一个重要准则。
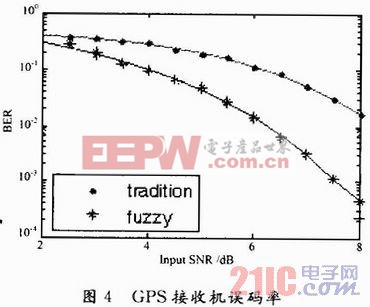
图4给出了两种GPS接收机对接收信号进行解扩解调后数据信号的误码率曲线特性,可以看出采用了模糊控制环路的接收机误码率性能更优。较低的误码率保证了接收机定位信息的准确度。

















评论