基于模糊控制的高灵敏GPS接收机设计
在载波环中,通过积分一清零消除信号ip(t)与qp(t)中的高频信号成份和噪声,以提高载噪比,它发挥着相当于低通滤波器的作用。因为这里的积分运算是将I路与Q路上的信号分开来进行,而不是将两者混和起来,所以这种积分称为相干积分,而相应的积分时间就称为相干积分时间Tcoh。若t1代表积分初始时间,对式(2)、(3)所示的相关结果ip(t)和qp(t)分别进行时间Tcoh的积分可得:

式(7)表明相干积分结果的幅值Ap(n)呈关于频率误差fe的sinc函数,其中横轴为频率差异fe,其主要由卫星运动、用户的动态性和接收机晶体振荡频率漂移导致。如果相干积分时间Tcoh越长,sinc函数曲线在横轴方向上越被压缩,于是在相同大小的频率误差fe条件下,相干结果受到的削弱程度越高。因此,为了容忍可能出现的较大频率误差,接收机跟踪环路应当选用较短的相干积分时间。
相干积分时间Tcoh是接收机设计的一个关键参数,也是GPS接收机设计中的一种妥协处理:一方面,为了增强滤波效果,降低噪声和提高跟踪精度,积分滤波器长;另一方面,为了支持用户的高动态性,让跟踪环路能更大程度地容忍由用户运动而导致的频率跟踪误差fe,并且限制频率误差损耗,积分滤波器的通带带宽必须尽量宽,也就是说Tcoh的值应该尽量地短。可见,相干积分时间的取值问题必须兼顾接收机的噪声和动态两个方面的性能。
1.2 码延迟锁定环路
接收机码环首先通过C/A码发生器复制一个其希望跟踪的那颗GPS卫星所发射的、具有一定相位的C/A码信号,并将这一复制C/A码与接收信号做相关运算;然后码相位鉴别器检测所得的相关幅值是否达到最大,并且从中估算出复制C/A码与接收C/A码之间的相位差异;将滤波后的码相位差异作为C/A码数控振荡器的控制输入,以相应调节C/A码发生器输出的复制C/A码的频率和相位,使复制C/A码与接收C/A码保持对齐。
对图1中的相关器进行1 ms的相关运算,混频结果进行相干积分,分别计算出E和L支路上的积分结果IE(n),QE(n),IL(n)和QL(n)。相干积分值的大小除与频率误差fe和自相关值R(τe)有关以外,还分别与载波环相位跟踪误差φe和余弦值、正弦值成正比。如果载波环所采用的锁相环未到达稳态,或者载波环采用锁频环的形式,那么相位差异φe很可能既不为零,也不是一个恒定值,于是接收信号能量会随机分散在两个支路上,这使得码环不能仅根据支路上的相干积分值就可靠地检测出C/A码的相关值大小。为了避免这种过度依赖载波环的工作形式和状态,码环经常采用非相干形式来检测相关结果。它将对应于同一码相位延时支路的两个分支上的相干积分结果进行平方后相加,所得的结果称为C/A码的自相关功率。自相关幅值分别为:

尽管C/A码自相关幅值仍均与sinc(feTcoh)的绝对值成正比,但是不再受到复制载波相位正确与否的影响,从而使码环变得更加具有鲁棒性。非相于积分时间定义为Tcn=NncTcoh,即每个非相干积分值需要经过Tcn长的时间才能得到。虽然非相干积分中的积分运算能增大信噪比,但是平方运算引入了平方损耗LSQ。根据式(8)得到如下的相关信号功率:
式中
2 模糊控制环路设计
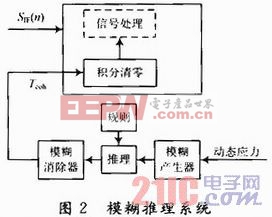
在GPS接收机跟踪环路中,积分时间Tcoh和频率跟踪误差fe之间存在相互矛盾的一面。当积分时间增加时,通过降低带内噪声功率从而提高跟踪精度,但对由用户运动而引起的跟踪频率误差容忍度较小;反之,提高了接收机的高动态性能,但降低了跟踪精度。因此为了获得更高的动态性能和跟踪精度,本文提出了一种受ELSE规则支配的模糊推理系统。由于ELSE规则的存在,该算法可以确保至少有一个规则能得到满足,从而使得在任何输入数据条件下都能成功地执行推理机制。模糊推理系统框图如图2所示。本文引用地址:http://www.eepw.com.cn/article/160305.htm

















评论