基于DSP交流伺服系统与CAN总线的通信设计

1 DSP的CAN控制器
TI公司的低功耗、高速DSP芯片TMS320LF2407A具有高速运算能力和高效控制能力。其内嵌的CAN控制器是一个完全的CAN控制器,完全支持CAN2.0B协议,它主要有以下特点:有6个邮箱,其数据长度为0~8 B,其中接收邮箱有局域接收邮箱屏蔽寄存器,在发送出错或仲裁时丢失数据的情况下,有自动重发功能、可编程的位定时器和总线错误诊断功能。
CAN控制器的内部结构图如图1所示。
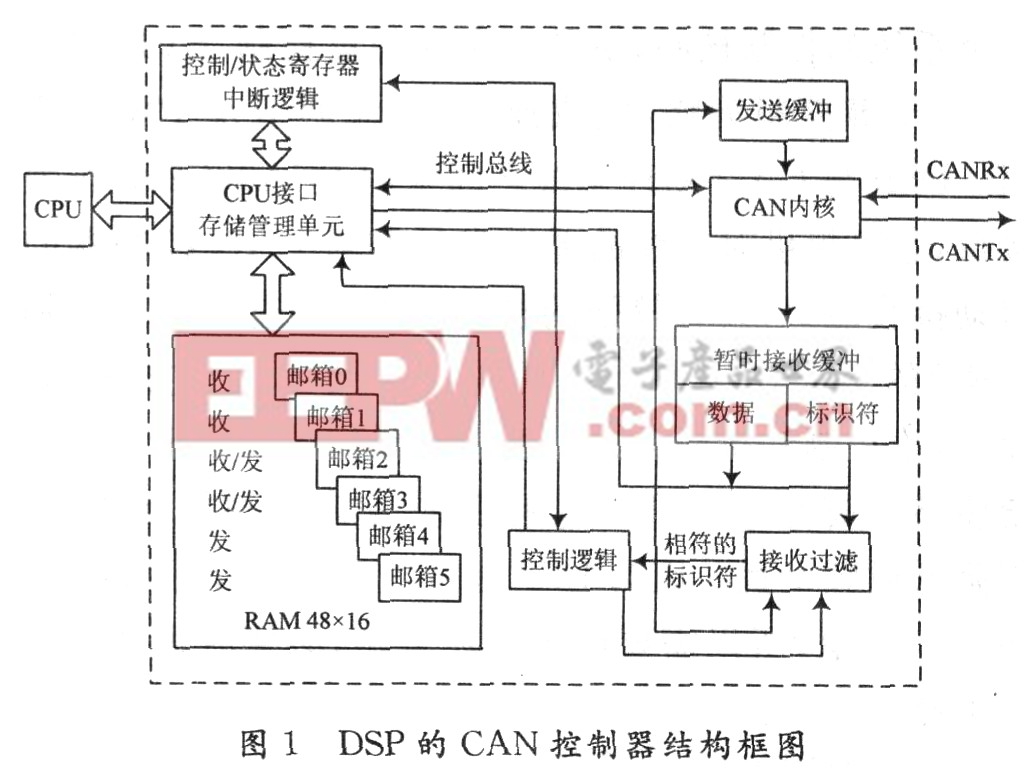
工作过程如下:CAN控制器在接收信息时,先将要接收信息标识符与相应接收邮箱的标识符进行比较,只有标识符相同的信息才能被接收;接收信息时,将数据存入邮箱,标识符存入相应的寄存器;接收完成后,中断标志位被置位。CAN控制器在发送信息时,先将要发送的数据写入邮箱,再设置发送请求位,发送完成后发送应答信号和中断标志位被置位,如果发送失败,发送邮箱将再次发送。
2 系统结构
使用CAN总线的交流伺服系统结构原理图,如图2所示。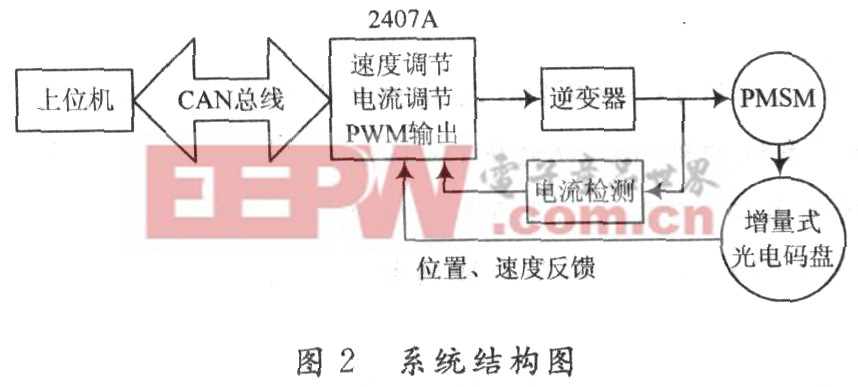
上位机采用带有CAN适配卡的通用计算机,上位机的主要功能是:通过CAN总线接口与DSP进行通信,接收DSP传来的数据进行处理并向节点发送控制指令。节点负责数据采集、控制、执行。上位机和节点之间通过CAN网络实现数据交换。










评论