基于CAN总线智能建筑监控系统的通信协议设计

摘要:从研究CAN2.OB总线规范入手,介绍了CAN总线规范的硬件基础,分析了CAN总线报文格式,通过对报文标识符的分配,设计了应用于该系统的通信协议,并给出了软件设计流程,较好地解决了智能建筑监控系统通信过程中的仲裁问题。
关键词:智能建筑;CAN总线;通信协议;标识符
现代智能建筑监控系统广泛采用了现场总线技术。现场总线的种类目前有40多种,但适合智能建筑且在我国推广的主要有两种:CAN(Control Area Network)总线和Lonworks总线。CAN总线技术以其可靠性高,结构简单,传输距离长和成本低而具有巨大的应用潜力。
控制局域网CAN是现场总线技术中最成熟、最有发展前途的微处理器局域网络。协议采用总线型拓扑结构,通过研究CAN2.0B协议规范,制定了符合智能建筑监控系统的通信协议,并进行了通信节点软件的设计。
1 基于CAN总线的智能建筑网络拓扑结构
CAN总线的智能建筑监控系统拓扑结构,如图1所示。该系统由3部分组成:上位机、CAN通信节点和各个现场智能设备组成。通信节点的数量可根据建筑物的规模增减,CAN总线作为通信网络将各个节点连接成一个分布式智能监控系统。
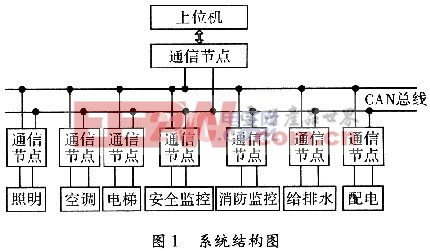
(1)上位机:由计算机和监控软件组成,对整个智能建筑监控系统的管理和控制,是整个系统的中心。
(2)CAN通信节点:各通信节点功能相同,主要完成把现场设备采集到的实时数据发送到CAN总线上,接收CAN总线发送来的控制信息。CAN通信节点的硬件由微处理器、CAN控制器SJAl000、CAN收发器PCA82C250组成。
(3)现场智能设备:由微处理器、和现场功能装置等组成。完成检测、报警、控制、显示等功能。智能建筑监控系统现场设备由照明、空调、电梯、安全监控、消防监控、给排水,配电等组成。
2 CAN总线通信协议的硬件基础
CAN总线协议描述了信息在设备之间的传递规则,它对层的定义与开放系统互连模型OSI一致,CAN被分为应用层、数据链路层和物理层3层,各层之间互相透明,每一层只与另一设备上相同的那一层通讯,实际的通讯是发生在每一设备上相邻的两层之间,而各个设备只通过物理层的通信介质连接在一起。
CAN总线规范定义了模型的最下面的两层:物理层和数据链路层。CAN总线驱动器和通信介质则实现了物理层的主要功能。CAN总线控制器实现了总线协议中规定的数据链路层的传输任务。常用的CAN总线驱动器有Philips公司的PCA82C250,总线控制器是SJAl000,通信介质是双绞线或同轴电缆。
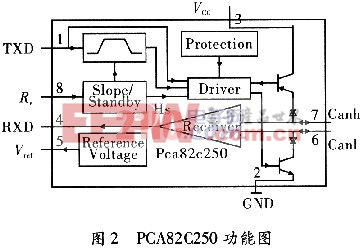
2.1 总线驱动器PCA82C250的工作原理
PCA82C250是CAN总线控制器与物理导线之间的接口,该驱动器可以提供对总线的差动发送和接收功能。PCA82C250的驱动部分由1个PNP的极管和1个NPN的三极管组成。这2个三极管根据TXD的信号导通或截止。当TXD=0时,2个三极管处于导通状态时,总线上显示为显性电平。当TXD=1时,2个三极管处于截止状态,总线上显示为隐性电平,此时驱动器对总线的影响很小。因此,如果存在其他节点发送显性电平,则总线的电平状态就是显性,只有所有的驱动器都发送隐性电平,总线的电平状态才是隐性。实现了CAN总线物理层的线与功能。PCA82C250功能图,如图2所示。






评论