排爆机器人控制与无线通讯系统

引言
本文引用地址:https://www.eepw.com.cn/article/152491.htm排爆机器人属于搬运机器人的一种类型,很多搬运机器人是模仿人类的动作,用来帮助或部分代替人来进行繁重、危险、重复等工作。排爆机器人模仿人类的行走、抓取物体的动作,可以被用来排除现场的爆炸物。排爆机器人机械部分包含行走小车和机械手臂。
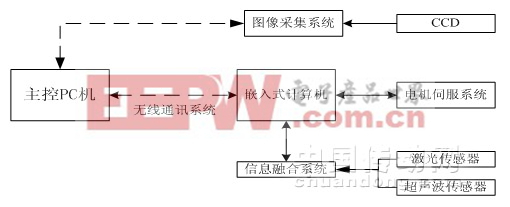
排爆机器人控制系统不再采用原来机器人所采用的PLC控制方式,而是基于嵌入式工控机的基础上,采用基于Linux平台的开放式构件库,运算速度极快,可以达到微秒级。排爆机器人控制系统由三部分组成,即传感器部分、机器人本体、操作控制台组成。传感器部分包含宽接入、多信息融合器。宽接入、多信息融合基于ARM9系统,由12位精度以上A/D、32路I/O、RS232通讯接口组成,能融合多种传感器信号;机器人本体包含嵌入式控制计算机和各关节伺服电机,能驱动各轴(带补偿),分配各轴运动,处理和控制各种状态量;操作控制台部分包含主控PC机、指令解码器、图像解码器、无线接收发射器等。CCD摄像机和超声波传感器所获得的图像信息、障碍物信息,经无线传输至主控PC机。主控PC机使用图像识别和分析技术获得对象物体的形状和位置信息,同时将目标物、障碍物等三维图像信息显示在计算机屏幕上。在人工指明目标物后,主控PC机经人工智能(模式识别、路径规划、轨迹避碰等)计算;将控制指令通过无线传输给机器人本体嵌入式控制计算机,自动控制机器人运动。基本结构如图1所示:
2 小车的行走控制
人工通过控制杆(或按钮),在小车引导图像(可视信号)的指示下,完成前进、后退、左转、右转和原地旋转的功能直至达到机械手的手爪能抓取可疑爆炸物的位置为止。机器人的平衡是利用整机的动力学算法求得,将求得多种数据去控制机器人手臂的空间姿态从而达到整机平衡而不至于倒覆。例如当小车在斜坡作上升运动时,机器人手臂往前靠以保持整机的平衡。小车在运动过程中需要避开可能遇到的障碍物。通过环境传感器如CCD摄像、超声波传感器等取得障碍物大小及环境信息,实现小车避障,即所谓的路径规划(如图2所示)

图2 排爆机器人路径规划示意图
3 机械手的运动控制
机械手的运动控制(如图3)是多级控制系统:位于最上层的AI级是人工智能层。它是利用CCD摄像机和超声波等传感器获得障碍物轮廓与距离以避开障碍物实现避碰,这就是“轨迹规划”(如图4)。
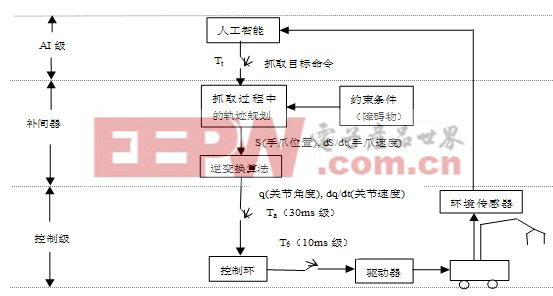
图3 机械手多级运动控制系统
linux操作系统文章专题:linux操作系统详解(linux不再难懂)










评论