半导体培养箱的ARM嵌入式控制系统研制

2.3 系统应用层的程序设计
应用层的程序设计主要是在Qt/Embedded平台上完成的,负责设计触摸屏的应用程序GUI,另外通过调用驱动程序以实现硬件平台的工作算法。Qt/Embedded是由Trolltech公司开发的面向嵌入式的Qt版本。它通过Qt API与Linux I/O以及Framebuffer直接交互,拥有较高的运行效率,其类库采用C++封装且完全面向对象以实现真正组件编程。其开发套件使用C++语言编程,具有功能强大、使用简单、控件资源丰富且可移植性好等特点[7]。
本系统主程序的触发来自两方面。其一是按照系统时钟,依据时序触发各事件并完成相应的处理;另一方面由用户界面操作触发。根据设计要求,系统主程序采用双线程工作方式,分别定义Ctrb_n 与SensorT继承QThread实现双线程。 QThread代表在程序中一个单独的线程控制[4],在多任务操作系统中,它和同一进程中的其他线程共享数据,但运行起来就像一个单独的程序一样。QThread不是在main()中开始,而是在run ()中开始运行的。
在工作算法中添加模糊PID自适应控制,使控制器能够在线自动调整比例系数Kp、积分系数Ki和微分系数Kd,以期获得最佳的温度控制。在PID控制器中,比例系数Kp值的选取决定于系统的响应速度,积分控制Ki用于消除系统的稳态误差,微分系数Kd在于改变系统的动态特性。调节初期选取较大的Kp值以提高响应速度,较小的Ki值以防止积分饱和,Kd=0以保证系统的稳定性;在调节中期,随着误差的减小Kp也逐渐变小,Ki值加大以尽量消除余差,Kd值取较小值以调节系统的动态特性;在调节过程后期,Kp值调到较小值以保证系统的平稳性,Ki值取适中以消除余差,Kd值取小值以控制过程的制动作用[5]。主程序的工作流程如图5所示。

3 结果分析
在室温为33℃时,设定目标温度为48℃,分别采用普通PID算法与模糊自适应PID算法测得实验数据,并利用MATLAB对所测实验数据进行比较分析,得到图6所示的温度变化曲线。
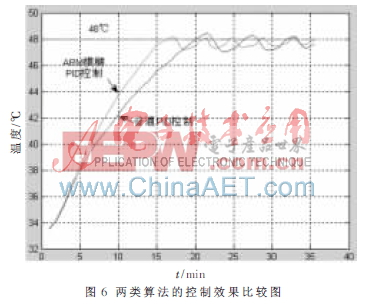
从图6可知采用普通PID控制时,具有调节速度慢、超调量大以及精度不高等特点;而ARM实现的模糊PID控制,其调节时间相对于普通PID控制而言减小了5 min, 超调量变小, 平稳性更好,且控制相对误差达到±1.1%。热电半导体的应用,相对于传统的加热制冷设备,在减小噪音和环境污染等方面有很大的改进,从而提高了控制质量,降低了能耗。
本文实现了一种基于ARM9与嵌入式Linux操作系统并采用新型热电半导体为温控元件的控制方案,经反复实验调试该培养箱已达到相对误差±1.1%的控制要求,所设计的控制方案具有温度调节响应快、超调量小、性能稳定等特点。该方案具有低功耗、无污染及触屏控制等优点,具有良好的市场潜力。
参考文献
[1] 张晓林.嵌入式系统应用[M]. 北京: 高等教育出版社,2008.
[2] 崔光照,陈富强. 基于ARM9的无线传感器网络网关节点设计[J]. 电子技术应用,2008, 34(11):115-118.
[3] 艾红,王洪涛. 基于ARM的嵌入式远程监控系统[J].电子技术应用,2008,34(9):66-69.
[4] 周慧玲,王智威,张凤英,等. 基于ARM7和ZigBee技术的物流机械设备测振系统的设计与实现[J].测控技术, 2010,29(2):33-35.
[5] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[6] 毛德超, 胡希明.Linux内核源码情景分析[M].杭州: 浙江大学出版社,2001,9.
[7] SLOSS A N,SYMES D,WRIGHT C. ARM嵌入式系统开发—软件设计与优化[M].沈建华,译.北京:北京航空航天大学出版社, 2005.
[8] 宋戈, 鹤松.51单片机应用开发范例大全[M].北京: 人民邮电出版社, 2010.
[9] 刘辉. 半导体多级制冷器的设计与性能优化[D] .上海: 同济大学, 2008.

pid控制器相关文章:pid控制器原理
半导体制冷相关文章:半导体制冷原理





评论