TMS320LF2407A实现教育机器人硬件平台
2.2 寻迹模块设计
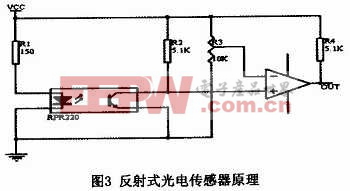
本文引用地址:http://www.eepw.com.cn/article/150171.htm此部分采用光电传感器对路面信息进行识别。采用RPR220型光电对管,RPR220是一种一体化反射型光电探测器,其发射器是一个砷化镓红外发光二极管,接收管是一个高灵敏度的硅平面光电三极管,用3个该红外对管构成“一”字形排列在小车车头的底部,路径轨迹由黑线指示,根据落在黑线区域的光电三极管接收到的反射光线强度与白色区域的不同,由检测到的黑线光电管的位置来判断小车的位置方向看其是否偏离黑线,当红外对管的发射二极管发出红外线,经反射物 (白线)反射到接收管,是接收管集电极与发射极之间的电阻变小,输入端电位变低,经比较器比较后输出低电平,当红外线照射到黑线上时,反射到接收管上的光亮减小,接收管的集电极与发射极间电阻增大使得输出高电平,将输出端信号送至2407A进行分析处理,反射式光电传感器原理如图3所示。3个传感器中如果位于中间的传感器(中传感器)检测到黑线,从传感器将发出“有线”信号,后轮两电机继续接通运转,结果驱动车体前进。如果除中传感器之外,左、右传感器中的任一个未检测到黑线,则该传感器输出“无线”信号,这时脱离引导线的传感器对侧的驱动电机停止运行,同侧电机继续运行,以此达到校正行进方向的目的。
2.3 红外避障模块设计
在小车行进过程中遇到障碍物,无法正常通过时,采用红外线检测器检测障碍物,并设计算法控制小车绕开障碍物继续寻迹前进。在小车前端两侧分别安装1个红外发射二极管(如东芝TLN110)进行红外信号的发射,红外线光源发出的信号调制到38kHz,使用2407A的PWM输出产生精确的信号。红外接收器由安装在车头中央的专用红外接收模块(如CRVPl738)对红外信号进行接收。小车前进路线中障碍物的判断原则:a.左边红外发射二极管发射信号,检测中央接收端,判断是否接收到信号;b.右边红外发射二极管发射信号,检测中央接收端,判断是否接收到信号;c.若左边发射时,有信号接收则小车左边有障碍物;若右边发射时,有信号接收则小车右边有障碍物;若左边和右边发射时,都有信号接收则小车正前方有障碍物。
在小车前进过程中有三种避障算法:沿左边行走,沿右边行走,左右相结合行走。本设计要实现在多种环境下都能避障,所以选择左右结合行走的算法。在小车左、右侧两侧等比例安装若干红外测距传感器(GP2D12),用于防止小车在避障过程中与障碍物发生碰撞,由于GP2-D12输出为0.4~2.4V的模拟信号,对应80~10cm距离,输出与距离成反比关系,且为非线性,可直接利用2407A集成的A/D转换功能,进行A/D转换得到相应参数,根据参数由 DSP进行相应处理,进行避障前进。在避障过程中,采用接近式控制策略,维持障碍物和传感器之间的距离为一固定常数,当两者距离偏小时,机器人向远离障碍物的方向旋转;当两者距离偏大时,向靠近障碍物的方向旋转。小车沿障碍物行进过程中,在车头底部光电传感器检测到黑线时,小车开始调整行进姿势,远离障碍物,继续寻迹。另外在小车无法成功绕过障碍物继续寻迹时,可以通过无线通信模块控制小车绕过障碍物使其继续寻迹。
2.4 无线通信模块设计
在机器人无法成功避障的情况下,可通过DSP与上位机(PC机)之间的通信协作来完成避障任务。DSP与PC机之间的通信方式分为有线和无线两种,多数采用串行通信。在本设计中采用无线通信方式,可以克服有线通信造成的操作不便。PTR2000是基于nRF401器件的无线数据传输模块,具有低频发射、灵敏度高的特点,使其在嵌入式短程无线产品中得到广泛的应用。要实现DSP与PC机之间的无线通信,需在DSP与小车车体分别安装一个 PTR2000器件,其系统硬件结构框图如图4所示。通过2407A的RXD和TXD引脚与PTR2000的DO和DI引脚直接相连,2407A的控制引脚与PTR2000模式控制引脚相连完成PTR2000于DSP之间的连接,通过采用MAX232器件在PTR2000和计算机串口进行RS-232和 TTL电平之间的转换后,完成PTR2000和PC机串口的连接。在DSP和PC机端软件配合设置PTR2000的状态(发射或接收),选择固定的通信频道,并让PTR2000一直处于正常工作状态,再通过设计软件系统实现无线通信的功能。










评论