深度感知是实现3D测绘、物体识别、空间感知等高级认知功能的基础技术。对于需要精确实时处理环境与物体的形状、位置和运动的领域,这项技术不可或缺。通过深度感知技术,可以准确获取目标物体的位置信息,有助于实现自适应和智能化操作。安森美的iToF方案:Hyperlux™ ID常规的间接飞行时间 (iToF) 技术尽管潜力巨大,但在实际应用中仍面临挑战。为了解决这一难题,安森美开发了 Hyperlux ID 高性能 iToF 传感器系列。该系列运用先进的像素和堆叠技术及多种特性,拓展了 iToF 方法的应用范围。下
关键字:
iToF 安森美 深度感知
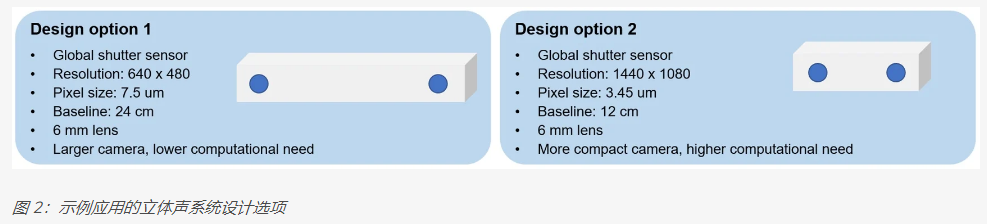
有多种 3D 传感器方案来实现深度感知系统,包括立体视觉相机、激光雷达和TOF(飞行时间)相机。每个选择都有其优缺点,其中,嵌入式深度感知立体系统成本低,坚固耐用,适合户外使用,并且能够提供高分辨率的彩色点云。目前市场上有各种现成的立体感知系统。有时系统工程师需求根据精度、基线(两个相机间距)、视野和分辨率等因素,构建定制系统来满足特定的应用需求。在本文中,我们首先介绍了立体视觉系统的主要部分,并提供了有关使用硬件组成和开源软件制作定制立体相机的说明。由于此设置专注于嵌入式系统,因此它将实时计算任何场景的
关键字:
立体视觉 深度感知
引言
对于自主机器人导航和其它机器视觉应用来说,实时深度感知是很关键的。目前通过立体图像来计算深度的算法计算量很大,例如差异测绘,要占用CPU大量的时间,或者需要用昂贵的器件进行实时操作。
针对立体摄像的深度感知,FPGA解决方案能使处理器的时间得到缓解,减少或除去器件的成本,例如MPU、DSP、激光器和昂贵的镜头。通过提供给机器人其环境中 的差异测绘,FPGA使机器人中的CPU专注于重要的高层任务,例如建图和定位。
差异测绘
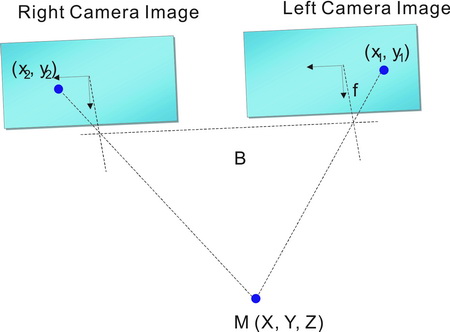
加深度感知到机器人的常用技术是用两个水平放置的
关键字:
机器视觉 FPGA 深度感知 嵌入式 DSP 200806
深度感知介绍
您好,目前还没有人创建词条深度感知!
欢迎您创建该词条,阐述对深度感知的理解,并与今后在此搜索深度感知的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473