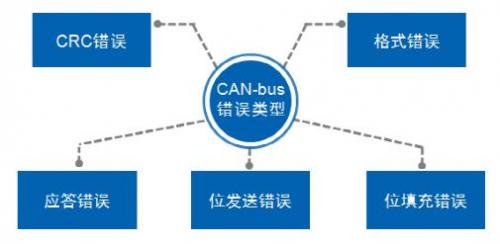
局部错误,全局通知是CAN总线错误类型中较为典型的一种,如何通过错误报文及波形快速定位错误原因呢?本文结合现场实测案例简要分析。 一、CAN总线错误简介 在CAN总线中存在5种错误类型,如图1所示:它们互相并不排斥,下面简单介绍一下它们的区别、产生的原因。 图1 5种错误类型 位错误:向总线送出一位的某个节点同时也在监视总线,当监视到总线位的电平和送出的电平不同时,则在该位时刻检测到一个位错误。但是在仲裁区的填充位流期间或应答间隙送出隐性位而检测到显性位时,不认为是错误位。 填充错误:在使用
关键字:
CAN 总线
CAN总线从上个世纪80年代开始,逐渐在汽车电子、轨道交通、医疗电子、工程机械等广泛的工业场合应用。这个“古老”的总线,最让人“不爽”的地方,就是一帧只能传输八字节数据,如果要一次传输更长字节,需要分帧,而选择一种可靠的分帧方法就是使用者一定要注意的。 CAN总线作为汽车电子而生的总线,提出了“优先级自动仲裁”和“短帧快速传输”的控制概念,为了达到“高实时性”的快速控制目标。使用一帧八字节的通讯单元具有了一系列的优点缺点: 一、CAN通讯的优缺点: 优点 (1)8个字节正好是8个字节、4个16
关键字:
CAN
如何改善CAN电磁兼容性的措施-随着CAN技术的不断发展,其应用领域已经不局限于汽车制造,而在工业设备、工业自动化等领域也得到了广泛应用。但是,工业现场环境恶劣,电磁干扰较为严重,如何保证CAN总线通讯的可靠性尤为重要。
关键字:
CAN 电磁兼容
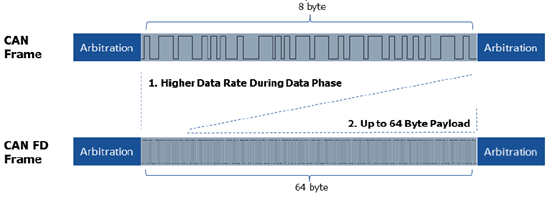
Microchip Technology Inc.(美国微芯科技公司)日前宣布,开始提供业界第一款外部CAN灵活数据速率(CAN FD)控制器。采用MCP2517FD,设计人员能够很快从CAN 2.0升级到CAN FD,受益于CAN FD增强协议。 CAN FD相对于传统的CAN 2.0有很多优势,包括更快的数据速率和数据字节消息扩展等。前沿的MCP2517FD CAN FD控制器可用于任何单片机(M
关键字:
Microchip CAN
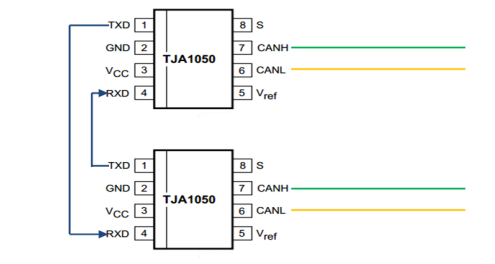
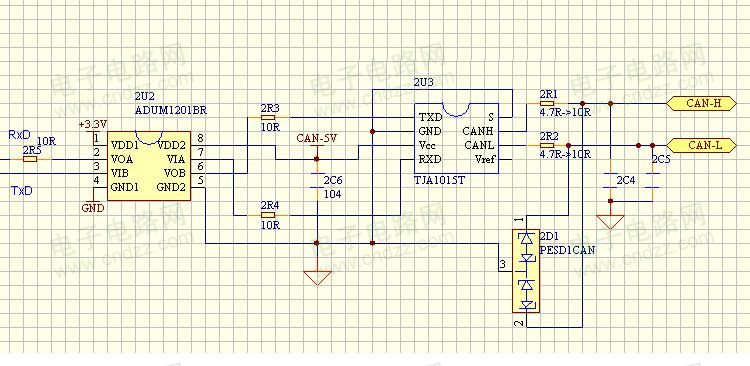
CAN中继器是大型CAN网络中经常用到的设备,它可以延长传输距离,改变拓扑结构和隔离干扰,但也增加了设计成本。有人说,只要2颗CAN收发器芯片就可以实现CAN中继功能。到底行不行呢? 一、CAN收发器简介 ISO 11898是一个使用CAN总线协议的汽车内高速通讯国际标准。CAN收发器是协议中数据链路层和物理层的接口部分。常见的CAN收发器芯片有NXP(原Philips)的PCA82C250/251、TJA1050/1051等型号。由于PCA82C250和TJA1050总体的引脚和功能都
关键字:
CAN 中继器
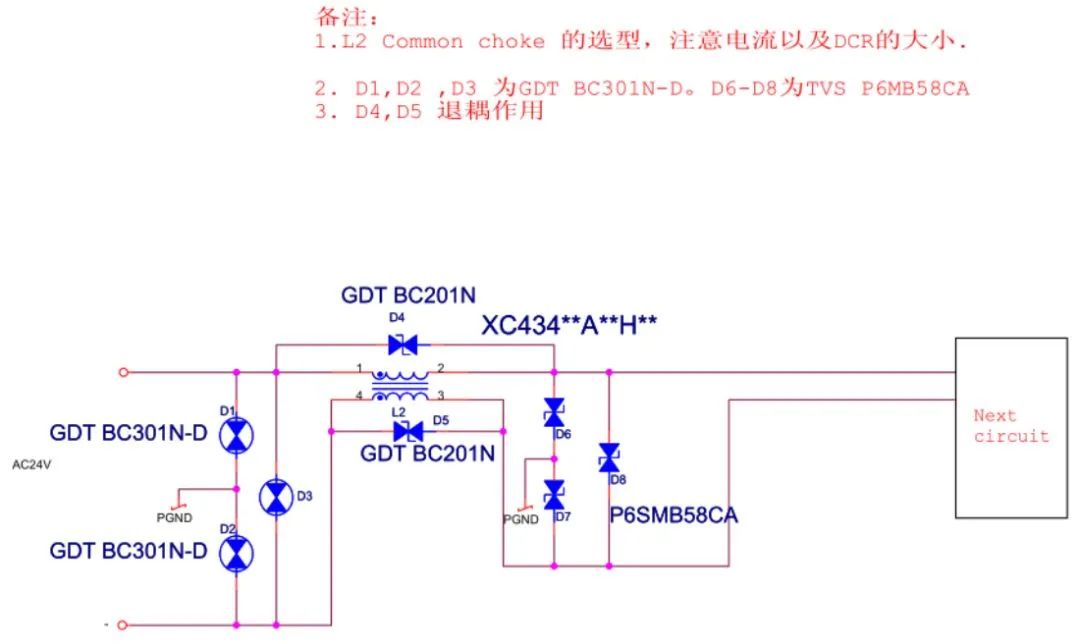
CAN-bus起源于汽车总线,目前被广泛应用于环境复杂的工业现场,因此必要的总线防护是主板及设备安全的重要保障。今天这里跟说一说CAN总线防雷防护设计。
从广义上讲防雷包含两个概念,一是防雷击二是防浪涌。雷击是雷雨云中电荷瞬间释放的现象,它能在周围引起高能、瞬变的电场及磁场。浪涌包括浪涌电流、浪涌电压,它是指电路中瞬间出现超过正常工作电压、电流的现象,如图1,雷击又可分为直击雷、非直击雷,直击雷是雷电直接作用到物体上,非直击雷则是通过电磁场感生出电动势、电流作用到物体上
关键字:
CAN-bus
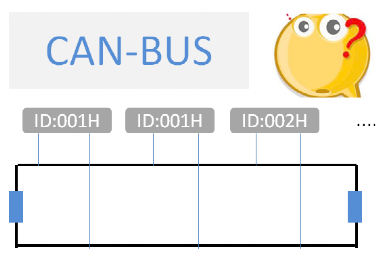
CAN-bus网络中原则上不允许两个节点具有相同的ID段,但如果两个节点ID段相同会怎样呢? 实验前,我们首先要对CAN报文的结构组成、仲裁原理有清晰的认识。
一、CAN报文结构 目前使用最广泛的CAN-bus网络标准是V2.0版本,该标准又分为A、B两部分,它们主要的区别在仲裁区域的ID码长度。其中CAN2.0A(标准帧)为11位ID,CAN2.0B(扩展帧)为29位ID。下表1为CAN报文结构:
表1 CAN报文结构
关键字:
CAN CAN-bus
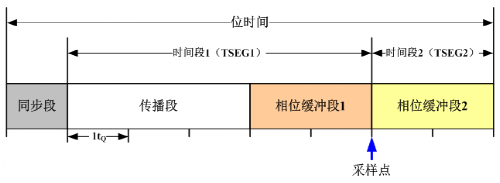
CAN总线采用的是异步串行通信,也就是没有单独的时钟线来保证各个收发器之间时钟的一致,每个收发器是按事先设置的波特率来对总线上的电平进行分位。因此波特率设置准确对CAN总线的稳定通信来说非常重要。 CAN总线里我们可以通过对CAN 节点里的位定时寄存器的控制来实现不同波特率的通信。CAN协议里将一个位时间分为同步段、传播段、相位缓冲段1和相位缓冲段2。每个段的时间长度都可以用一个整数的基本时间单位表示,该基本时间单位由系统的时钟振荡器分频得到。 同步段位于一个位的起始位置,CAN-bus
关键字:
CAN 波特率
CAN总线采用的是异步串行通信,也就是没有单独的时钟线来保证各个收发器之间时钟的一致,每个收发器是按事先设置的波特率来对总线上的电平进行分位。因此波特率设置准确对CAN总线的稳定通信来说非常重要。 CAN总线里我们可以通过对CAN 节点里的位定时寄存器的控制来实现不同波特率的通信。CAN协议里将一个位时间分为同步段、传播段、相位缓冲段1和相位缓冲段2。每个段的时间长度都可以用一个整数的基本时间单位表示,该基本时间单位由系统的时钟振荡器分频得到。 同步段位于一个位的起始位置,CAN-bus规定跳变沿
关键字:
CAN 波特率
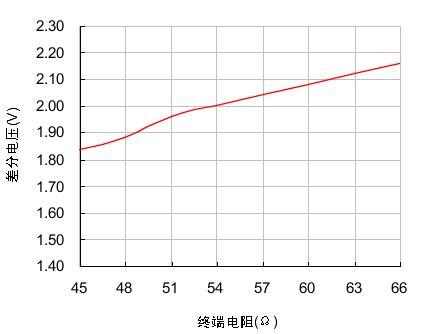
在CAN-bus电路设计中,理论上收发器支持节点数最多可做到110个,但实际应用中往往达不到这个数量。这里我们谈谈如何通过合理的CAN-bus总线设计,保证CAN网络中的通讯的可靠性和节点数量。 1.影响CAN总线节点数的因素 影响总线节点数的因素有多种,本文我们从满足接收节点的差分电压幅值方面来讨论,只有满足了这个前提条件,我们才能考虑总线的其他因素如寄生电容、寄生电感对信号的影响。 1)发送节点的CAN接口负载 为何考虑CAN接口负载? CAN接口负载即为CANH、CANL之间的有效电阻
关键字:
CAN-bus CAN
CAN总线调试过程中出现报文发送失败,很多工程师都对此只知其一不知其二,这里就CAN报文发送失败的问题我们来做一次探讨。 在了解CAN报文为什么会发送失败之前我们先看看一条正确的CAN报文到底应该是怎么样的,表1是一个正常标准数据帧的报文组成。
表 1 标准数据帧报文格式组成
图 1 标准数据帧格式 CAN总线是一种基于广播的通讯方式,为了保证总线上的每一个正常节点都能正确的接收到报文,报文
关键字:
CAN ACK
CANbus总线协议以高稳定性,高容错率而著称于世,然而仍有很多用户在使用的时候担心CAN会接受到错误的信息,在数据里增加了CRC校验的部分,这种做法是否有必要,CAN 会收到错误的数据吗? 信息的传递,古往今来都是人类无比关注的一个问题。从最原始的肢体语言到高端的电子信号,信息传达的方法五花八门。而对于信息安全的追求也是从古至今未有变过,我国西周时期的《太公兵法》就有过“阴符”“阴书”的设计来保证信息的安全。
图 1让人心忧的信息安全 而在我
关键字:
CAN CANbus
CAN总线一直以实时性强、传输距离远、抗干扰能力强、数据保证到达等特点而广泛应用于高可靠性的场合。但常常在观察CAN通信波形时,我们会发现差分电平在ACK段突然增高,这是什么原因导致的呢?这里结合测试实例对ACK电平偏高的原因做简单分析。 一、ACK简介 ACK的作用:确认一帧报文是否正常接收。 以标准数椐帧为例,从结构上看分成7段,分别为起始段、仲裁段、控制段、数椐段、CRC校验段、ACK应答段、帧结束段,如图1所示: 图1 标准数椐帧结构 ACK段长度为
关键字:
CAN ACK
引言 随着科学技术水平的提高,智能仪器仪表或微机装置等智能电子设备(IED)已广泛应用于工业现场。 网络打印服务器(network print server)可为智能电子设备提供可靠的共享打印服务,节约系统成本。CAN总线是一种支持分布或实时控制的现场总线,具有高可靠性、实时性和灵活性,广泛应用于汽车控制、工业控制、机器人、家用电器等领域。CAN总线已成为工业现场首选现场总线之一。设计的网络打印服务器采用CAN总线作为数据通讯网络,每个网络打印服务器可与几十甚至上百个智能电子设
关键字:
ARM CAN
有一个关于得克萨斯州民间英雄 Pecos Bill 的故事:那时,有人打赌他不能从从得克萨斯州的加尔维斯敦游过墨西哥湾到达弗罗里达州的基韦斯特。他训练了一个月,当这一天到来时他便一头扎进了墨西哥湾。Bill 不分昼夜地游了一个星期,期间战鲨鱼斗飓风。最终,他离自己的目标越来越近。然而,当他在海浪中看到远处的基韦斯特时,他意识到他已经太累,无法再继续向前游了,因此他转身游回了得克萨斯!
关键字:
线缆 CAN 总线
tinym0-can介绍
您好,目前还没有人创建词条tinym0-can!
欢迎您创建该词条,阐述对tinym0-can的理解,并与今后在此搜索tinym0-can的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473