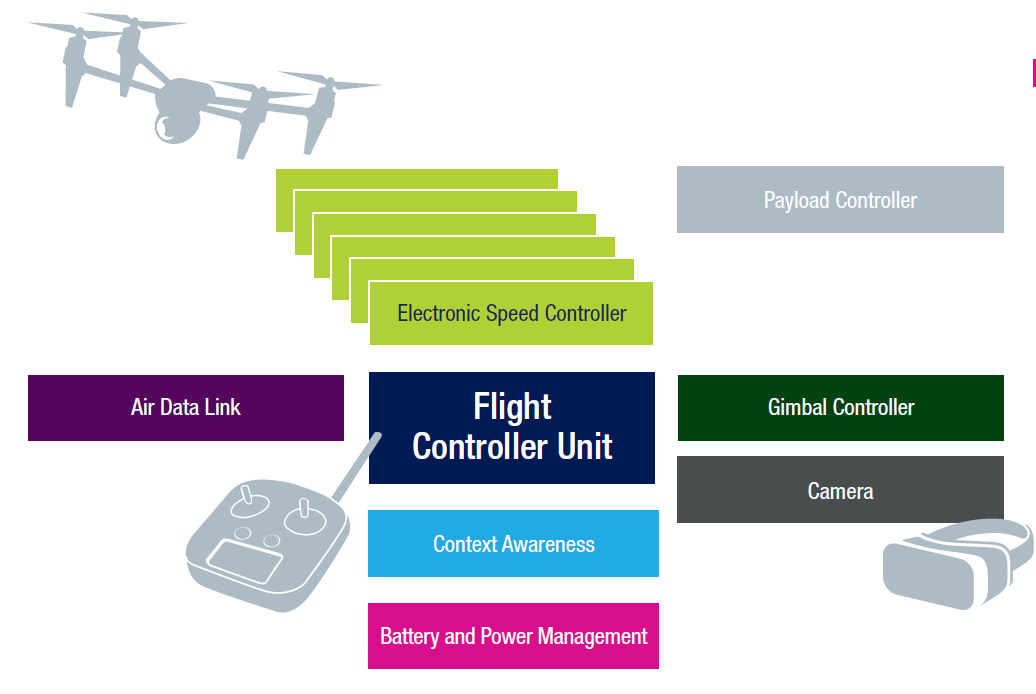
- 无人机技术非常有趣,因为它涉及最先进的设计原则: 平衡飞行时间,尺寸和重量,稳定性,系统复杂性,逻辑,特殊功能和关键安全著陆等演习。无人机制造商通常需要开发以下不同的子系统来生产可行的最终产品:•飞行控制器单元(FCU),用于管理不同条件下的飞行,依赖其惯性测量单元(IMU)用于稳定无人机悬停。在专业无人机中,FCU嵌入了GPS(全球定位系统)形成自动驾驶系统。•几乎四个电子速度控制器(ESC)用于控制电动机的复杂性算法,允许高转速,同时延长电池寿命。•摄像机稳定器,通过伺服电机旋转和稳定摄像机
- 关键字:
STM32F303 L63982 无人机 速度控制
l63982介绍
您好,目前还没有人创建词条l63982!
欢迎您创建该词条,阐述对l63982的理解,并与今后在此搜索l63982的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473