摘要 介绍一种简便实用的PIC编程器实现方案。设计思想是:以单片机作为主控机,欲写入的PIC程序代码存放在主控机中,由主控机提供PIC芯片编程所需信号
关键字:
PIC
编程器
本文为PIC16F97+eV1527解码源程序
关键字:
模拟技术
PIC
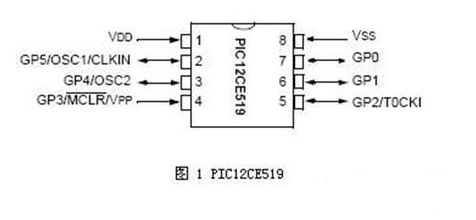
单片机入门不难------谈PIC系列(转自矿石收音机论坛---崂山)十年前的老帖子,讲得通俗易懂,分享之。 请看图1 这个8条腿的小螃蟹就是我们的第一顿饭,只要把它吃下去,以后的大餐就好办了。 第1、8条腿接电源 +5V 和 地线。头两条腿是螃蟹钳子,好吃的很。 现在剩下了 6 条腿 第2、3条腿 使用时外接一个晶振的东西 我们接一个 4 MHz的。 第4条腿是复
关键字:
PIC
八位单片机由于内部构造简单,体积小,成本低廉,在一些较简单的控制器中应用很广。即便到了本世纪,在单片机应用中,仍占有相当的份额。由于八位单片机种类繁多,本文仅将常用的几种在性能上作一个简单的比较,供读者在使用时作参考。 1. 51系列 应用最广泛的八位单片机首推Intel的51系列,由于产品硬件结构合理,指令系统规范,加之生产历史“悠久”,有先入为主的优势。世界有许多著名的芯片公司都购买了51芯片的核心专利技术,并在其基础上进行性能上的扩充,使得芯片得到进一步的完善,形成了一个庞大的体系
关键字:
AVR
PIC
单片机现在可谓是铺天盖地,种类繁多,让开发者们应接不暇,发展也是相当的迅速,从上世纪80年代,由当时的4位8位发展到现在的各种高速单片机……
各个厂商们也在速度、内存、功能上此起彼伏,参差不齐~~同时涌现出一大批拥有代表性单片机的厂商:Atmel、TI、ST、MicroChip、ARM…国内的宏晶STC单片机也是可圈可点…
下面为大家带来51、MSP430、TMS、STM32、PIC、AVR、STC单片机之间的优缺点比较及功能体现&h
关键字:
PIC
AVR
51、AVR、PIC、MSP430、ARM五大单片机全解析-据统计,我国的单片机年容量已达1-3亿片,且每年以大约16%的速度增长,但相对于世界市场我国的占有率还不到1%。这说明单片机应用在我国才刚刚起步,有着广阔的前景。培养单片机应用人才,特别是在工程技术人员中普及单片机知识有着重要的现实意义。
关键字:
ARM
PIC
AVR
51、PIC、AVR、16、32-BIT系列单片机区别与特点-8031片内不带程序存储器ROM,使用时用户需外接程序存储器和一片逻辑电路373,外接的程序存储器多为EPROM的2764系列。用户若想对写入到EPROM中的程序进行修改,必须先用一种特殊的紫外线灯将其照射擦除,之后再可写入。写入到外接程序存储器的程序代码没有什么保密性可言。
关键字:
51
PIC
AVR
32-BIT
PIC18F2455/2550/4455/4550之通用串行总线USB-PIC18FX455/X550 系列器件包含全速和低速兼容的USB串行接口引擎(Serial Interface Engine,SIE),它允许在任何USB主机和PIC单片机之间进行高速通信。 可以利用内部收发器或通过外部收发器将SIE 直接连接到USB。内部的3.3V稳压器也可以在5V的应用中被用作内部收发器的电源。
关键字:
pic
通用串行总线
usb
基于PIC16F87X的电子油门的控制主要介绍了电子节气门的构造,并分析了电子节气门系统的机械结构中存在的非线性问题。目的是实现节气门系统的位置控制系统,应用了PIC 的A/ D 转换以及脉宽调制功能来控制节气门。实验结果表明,该电子节气门控制系统具有良好的跟随特性,实现了节气门系统的位置控制,为提高汽车的动力性、经济性、排放性打下了基础。
关键字:
PIC
电子节气门
脉宽调制
发动机控制
本机器人取名为大白菜,是一个具有5个自由度的机器人,其中3个有电机拖动,能够实现击鼓的功能。机械臂本体由铝合金制作,底座由有机玻璃制作,控制电路分为主控制电路与子控制电路,主控制电路为单片机开发板PIC及其配套系统,子控制电路为声音与触感示教系统。机器人由整体电路及PIC控制,通过离线编程设计可以根据预先设定的程序击鼓,通过示教系统设计可
关键字:
击鼓机器人
机械臂
声音传感器
触碰开关
PIC
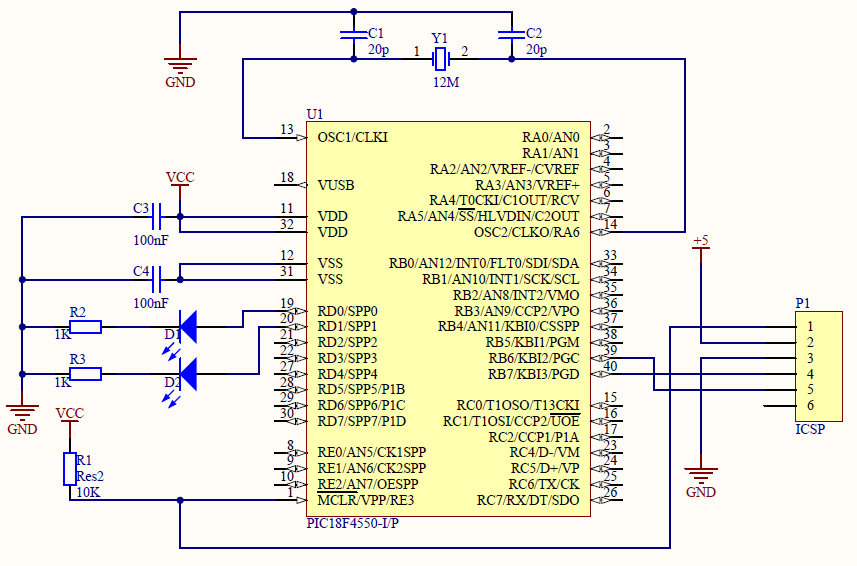
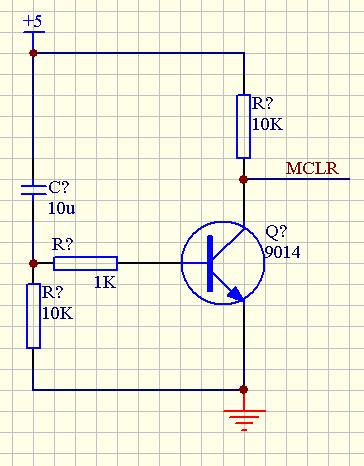
ICSP(In-Circuit Serial Programming)即在线串行编程,通过保持RB6和RB7引脚为低电平,VDD 为编程电压,并将MCLR(VPP)引脚电压从VIL增加到VIHH,器件便进入编程/校验模式。此时,RB6为编程时钟线,RB7为编程数据线。在该模式下,RB6和RB7都是施密特触发器输入,当RB7驱动数据时,它是CMOS输出驱动。 复位后,为使器件进入编程/校验模式,程序计数器(PC)指向00h地址。然后可向器件发送一个6位的命令,根据这一命令
关键字:
PIC
ICSP
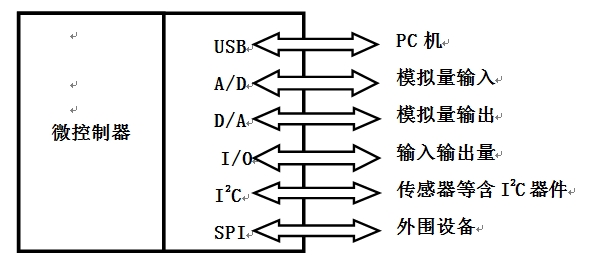
我们把所设计的数据采集系统功能分解为三大部分:数据采集部分、数据通信部分、数据处理部分。 数据采集部分应包含:A/D转换器,时序、模式控制,数据缓冲功能。它应能接受来自主机的命令,按不同模式控制A/D转换器采集数据,暂存于数据缓冲区,再根据主机命令发给主机。这部分功能由一个单片机及接口来实现是最优方式。 数据通信部分应包含:简单、高效、通用的数据通信模式和软硬件支持。它应能在数据采集和数据处理两部分之间实现目前最好的连接和沟通。因为USB作为一种外部总线标准,用于规范电脑与外部设备的连接和通讯,并
关键字:
PIC
USB
可能的原因:也许,您该检查一下您的电源走线是不是够粗,或者,程序是不是一开始运行就点亮LED或者叫BUZZER?因为,PICmicro开始任务的电压通常是蛮低的。如果因为上述原因而让电压骤降,可能会让Vcc电压瞬间掉至reset电压以下,而造成重置。如果您的示波器不够好,很有可能根本观察不到此电压变动之状况。 WDT TIMEOUT 的标准时间为18mSec, 但是非常重要的一点, WDT TIMEOUT 的最小值为7~9mSec, 而且会受温度的影响
关键字:
PIC
复位
利用太阳能照明是人类开发利用太阳能的一个主要用途,然而,由于太阳能辐射的不连续性和间歇性,以及目前单纯太阳能照明系统的投资和成本较高、部分 技术不够成熟等原因,太阳能照明系统经常出现在连续阴雨天时,由于
关键字:
PIC
太阳能
市电互补照明
摘要:以PIC单片机和CC1000为核心器件,设计并实现无线数据传输发射机;介绍PIC16C73芯片和CC1000芯片的性能,详细讨论发射机的硬件和软件系统设计并予以实现。 关键词:无线数据 传输发射机 PIC CC1000 本文介绍以P
关键字:
PIC
数据传输
发射机
摘要:随着科技的发展,对无刷直流电动机的性能提出更高的要求。本文在研究无刷直流电动机数学模型、导通方式的基础上,以单片机PIC16F877A为核心设计控制系统硬件电路和软件程序,硬件电路包括电机转子位置检测电路
关键字:
PIC
永磁无刷
电机
控制系统
BLDC
PIC16F170X/171X系列MCU集成运放、过零检测和外设引脚选择功能,可大幅降低设计复杂性与系统BOM成本。
关键字:
Microchip
PIC
1、PIC单片机程序的基本格式先介绍二条伪指令:EQU ——标号赋值伪指令ORG ——地址定义伪指令PIC16C5X单片机在RESET后指令计算器PC被置为全“1”,所以PIC16C5X几种型号芯片的复位地
关键字:
PIC
单片机程序设计
基础
项目是有关机器人控制的实现。控制部分采用PICl6F7X系列单片机,运用汇编语言编程,运行速度较快,能够达到系统的要求。在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手
关键字:
PIC
单片机软件
编程技巧
摘要:为适应LED照明个性化需求的不断变化,设计了基于手机蓝牙的无线LED调光器。系统采用低成本的8位PIC单片机作为主控制器,以蓝牙模块作为无线收发模块,通过串口通信连接手机蓝牙模块和单片机。调光器中的蓝牙模
关键字:
手机蓝牙
LED调光
PIC MCU
无线收发传输
传统51:适合菜鸟入门,容易上手,价格一般(从性价比方面说)。IDE环境推荐keil。
缺点:解密容易,一般功能也有,但AD、eeprom等功能要靠扩展,增加硬件和软件负担。
PIC:pic的好处就是各个型号的兼容性强,学好了PIC16f877a,16系列的就OK了,别的型号要用的时候拿出2分钟看看数据手册就行了。12系列、16系列、18系列也是充分的向下兼容。功能全,型号多,适于选型分析,抗干扰能力强。
缺点:解密容易,单片机价格贵(从性价比方面说)。
IDE环境:推荐pic
关键字:
C51
PIC
pic系列单片机复位电路的设计很重要,对于稳定运行有很大关系。此列出常用的复位电路,经验证完全可靠。可放心采用。
关键字:
pic
复位电路
基于PIC单片机和GPS接收模块的手持式GPS定位系统, 1 引言GPS以其高精度,全天候,全球覆盖,方便灵活和优质价廉吸引全世界许多用户。GPS的广泛应用改变了人们的工作方式,提高工作效率,带来巨大的经济效益。这里提出一种基于EM411GPS接收模块和PIC18F2550单片机的手
关键字:
PIC
GPS
在用单片机开发各种嵌入式应用系统时,异步串行通信是经常要用到的一种通信模式,很多应用中还要求实现多路异步串行通 信。大家平时熟悉的各种厂家的单片机,绝大部分片上只提供一个硬件UART模块,利用它可以方便实现一路串行通讯。PIC系列单片机也不例外,在其丰富的 产品家族成员中,除高端系列(PIC17/18)一些型号片上带有两路硬件UART模块外,其它大部分型号片上只有一路UART,一些低端廉价的PIC单 片机甚至还不带硬件 UART。为了提高系统的性能价格比,就要求设计工程师用软件增加实现一路或多路异步串
关键字:
PIC
UART
1 PIC 单片机振荡电路中如何选择晶体
对于一个高可靠性的系统设计,晶体的选择非常重要。尤其设计带有睡眠唤醒(往往用低电压以求低功耗)的系统。这是因为低供电电压使提供给晶体的激励功率减少,造成晶体起振很慢或根本就不能起振。这一现象在上电复位时并不特别明显,原因是上电时电路有足够的扰动很容易建立振荡;在睡眠唤醒时,电路的扰动要比上电时小得多,起振变得很不容易。在振荡回路中晶体既不能过激励(容易振到高次谐波上)也不能欠激励(不容易起振)。晶体的选择至少必须考虑谐振频点、负载电容、激励功、率温度特性
关键字:
PIC
晶振
1:中断名称
例如Timer1中断:
void __attribute__ ((interrupt)) _T1Interrupt (void)
{
//interrupt service roution code here..
}
函数名_T1Interrupt并不是随意选择的,她是中断向量表中预先定义的Timer1中断标志符,并且在连接器脚本中需要加载代码,加载的是“.gld”文件。
C30编译器中用到的__attribute__((
关键字:
PIC
中断
1:++、--操作符很智能,如果变量类型是整数,那么就是加1或者减1。但是如果是指针变量,那么增量就是指针变量的字节数。例如,对于表示16位整型数的指针,增量就是2,对于表示32为长整型数指针,增量就是4.
2:对于16位算数逻辑单元(ALU),对于32位的乘法实际上是通过执行16位数乘法运算和加法运算来实现的(复杂并且耗时)。
3:对于没有硬件浮点数单元(FPU)来说,对所有的浮点数操作都必须右边一起使用浮点算数运算库来编译处理,而算数运算哭的大小和复杂度比任何整数运算库都要大的多,因此
关键字:
PIC
浮点数
1:延时函数
初始化定时器然后使用函数:
while(TMR1
{
//wait
}
2:更新初始化函数
微控制器的控制寄存器只是简单的RAM记忆单元,可能一个电源波动,电磁脉冲等会改变它的内容(小概率),只要时间足够长就会发现。因此当设计一个在相当长时间内运行的应用时,用户应考虑到周期性的“更新”主要外围器件的控制寄存器。(让我想起我们的月球探测器是不是因为这个为题出故障了。。。)
关键字:
PIC
初始化函数
图书馆借的书,《16位单片机c语言编程基于PIC24》,人民邮电出版社。很不错的一本书。看了书才发现自己学习过程中忽略和轻视的部分很多,一一记录下来吧。
1:关于main函数
在进入main函数之前,微控制器会执行连接器自动插入一个较短的初始化代码段。这个代码段又被称为c0码。c0码将实现基本的例行内务处理,包括微控制器栈的初始化以及其他事物。
2:连接脚本
连接器脚本(.gld)文件是用来告诉连接器内存的预定义位置(由设备数据表决定)和提供基本的内存空间信息,如内存的可用空间
关键字:
PIC
GPIO
-pic介绍
您好,目前还没有人创建词条-pic!
欢迎您创建该词条,阐述对-pic的理解,并与今后在此搜索-pic的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473