- 0 引 言
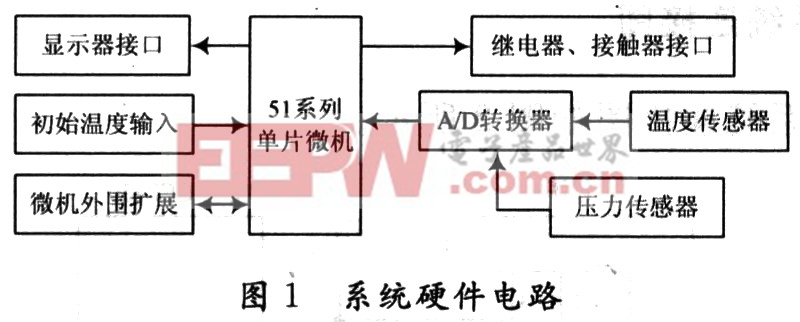
系统由真空泵电动机和油泵电动机各一台组成,要求用单片机完成管道压力检测和油箱温度控制。用压力传感器采集数据并送单片机处理。系统采用两组加热管加热,每组功率为24 kW。用温度传感器采集数据并
- 关键字:
控制系统 设计 滤油机 控制 微机 基于
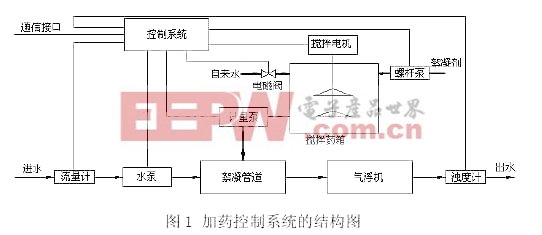
- 针对当前污水处理过程中加药控制效率低、絮凝效果不稳定的缺点,开发了一种具有CAN总线通讯功能的加药自动控制系统。并介绍了污水处理过程中加药系统的工作原理和基本结构,对控制系统的硬件电路和软件流程进行了详细说明。在实际运行中取得良好的应用效果。
- 关键字:
CAN 总线 控制系统 蒸馏 技术 LABVIEW OPC 基于 CAN
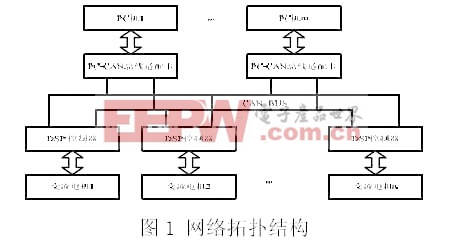
- 本文主要介绍了基于多DSP的CAN总线通信电机控制系统的设计,利用PC机作为监控主机,采用CAN总线接口卡实现CAN协议的物理层和数据链路层,最终实现对各节点电机的监控和管理。设计充分利用TI公司TMS320F2407A的高速运算能力和丰富的片内外资源,采用C语言进行编程。实验结果证明了其有效性和可靠性。
- 关键字:
控制系统 通信 同步 电机 DSP CAN 基于 CAN
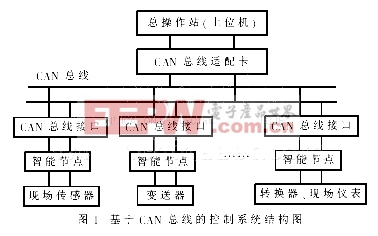
- 介绍了如何把模糊控制算法与CAN总线结合起来应用于控制系统;并设计了一种智能型模糊控制算法,给出了系统的整体结构和现场模糊控制单元的硬件实现电路及其软件设计思路。系统的仿真结果表明,该系统实时性好、控制精度较高。
- 关键字:
数据采集 控制系统 应用 总线 CAN 控制 基于 模糊 CAN
- 1 引言
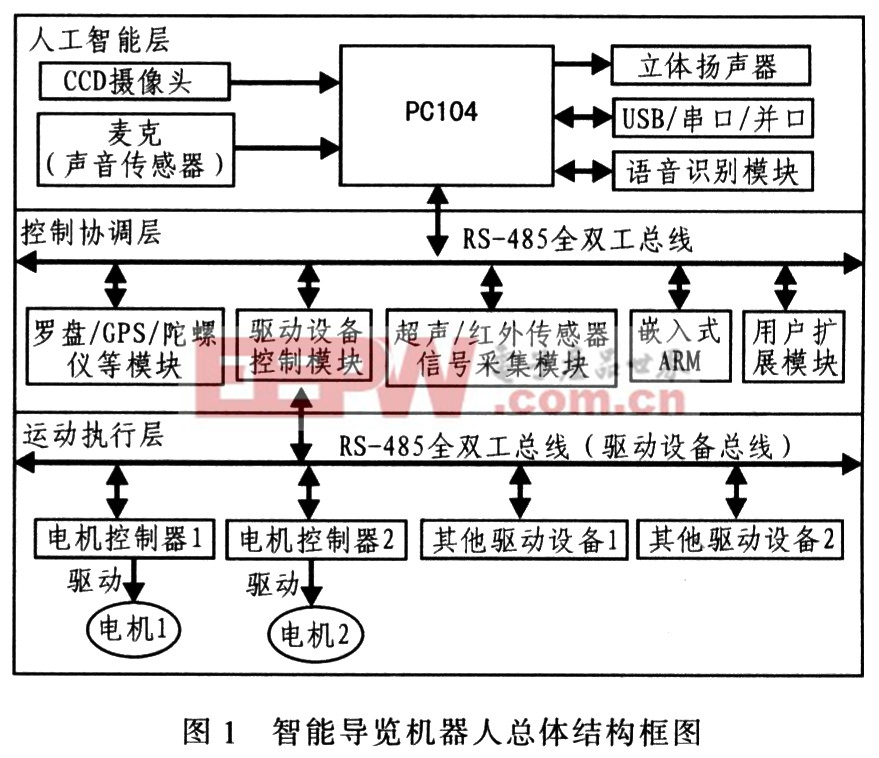
移动机器人是机器人学一个重要分支,且随着相关技术的迅速发展,它正向着智能化和多样化方向发展,应用广泛,几乎渗透所有领域。于春和采用激光雷达的方式检测道路边界,效果较好,但干扰信号很强时,就
- 关键字:
机器人 控制系统 设计 导览 智能 机器 视觉 基于
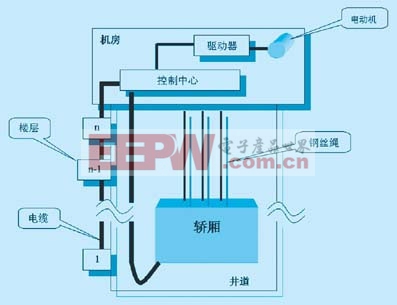
- 1 引言
在常规自动控制系统中,传感器与执行器是独立接线的,多个传感器和执行器构成的系统需要大量导线。通信总线应用到测控系统中,不仅能节省大量的导线,而且可提高系统的可靠性。已被广泛采用的
- 关键字:
控制系统 电梯 PLC 西门子 基于
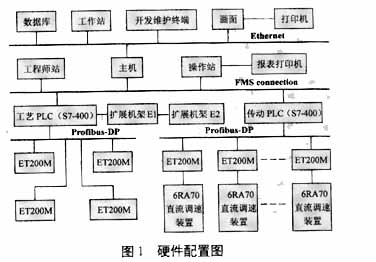
- 0 引言 随着计算机技术、通信技术和控制技术的发展,传统的控制领域正经历着一场前所未有的变革,开始向网络化方向发展。控制系统的结构从最初的CCS(计算机集中控制系统),到第二代的DCS(分散控制系统),发展
- 关键字:
现状 发展 网络化 控制系统
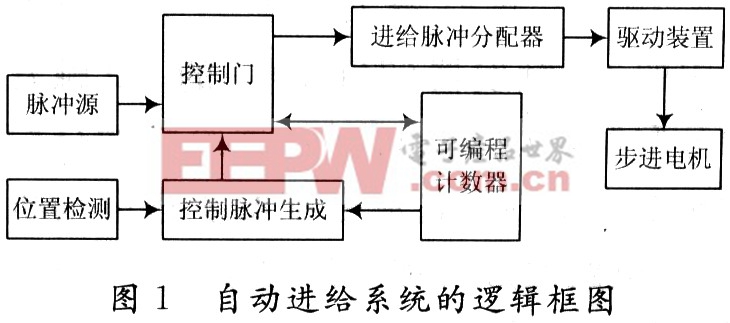
- 自动进给控制系统是数控机床等现代加工设备的重要组成部分,以中规模数字集成计数器IC74191为核心,利用EDA软件对数控机床自动进给系统研究和设计,给出自动进给控制系统的控制电路,分析了控制信号的传输方式和过程;利用虚拟逻辑分析对数控机床自动进给系统进行了仿真实验,结果完全符合设计要求。
- 关键字:
设计 实现 控制系统 自动 IC74191 基于 转换器
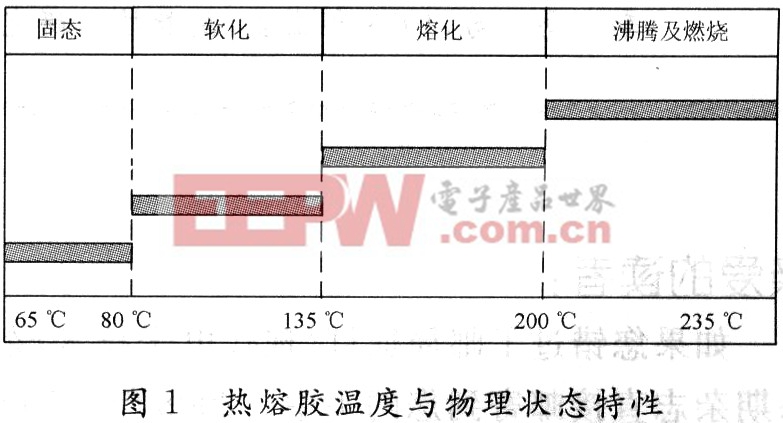
- 根据纸箱粘箱中对喷胶精度和速度的要求以及热熔胶的温度特性,利用PLC替代传统的继电器接触器控制系统,设计一种基于三菱FXIN-40MR的适用于纸箱封箱的PLC控制喷胶系统,给出系统的构成及控制的实现方法。在分析影响喷胶速度与精度控制因素的基础上,利用最小二乘法消除因喷胶头控制电磁阀滞后开闭对喷胶准确度的影响,使系统可实现单个纸箱多个方位的同时精确喷胶。
- 关键字:
设计 控制系统 PLC 基于 转换器
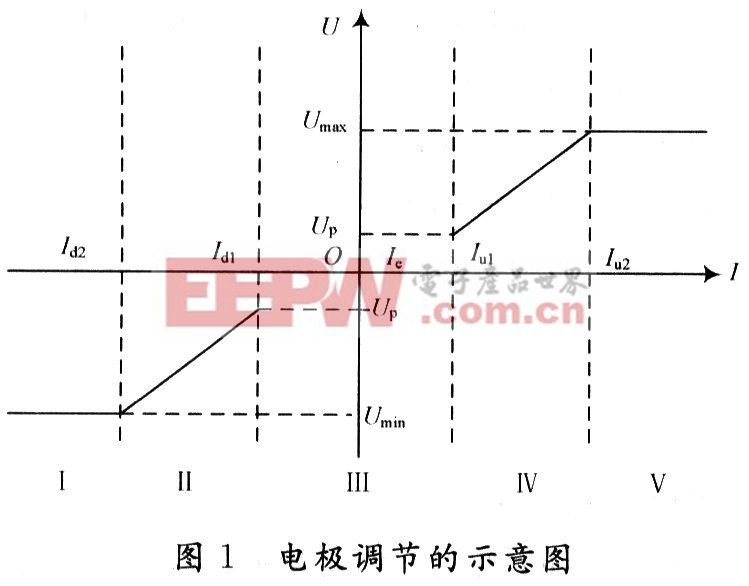
- 针对电弧炉的非线性、大滞后、强耦合、时变及随机干扰较强的特点,应用自适应控制理论,采用可编程逻辑控制器(PLC)为核心控制部件,实现电弧炉电极升降的自动准确控制,有效减少电极短路、断弧和振荡现象。在此给出控制方案、系统主要硬件及软件流程图。该系统已可靠运行于某炼钢厂,并实现了降低电炉电耗,提高产品质量的目的。
- 关键字:
控制系统 大型 PLC S7-300 基于 转换器
- 提出了一种以CAN总线为通信工具,DSP芯片为控制器的主处理器和双位置传感器的反馈结构,其配合主控计算机和底层控制器双层反馈的控制方式,可适于仿人步行机器人的分布式运动控制系统.整个控制系统结构灵活、功能强大、工作稳定可靠,可以显著提高仿人机器人的运动性能.
- 关键字:
运动 控制系统 研究 机器人 传感器 CAN 总线 基于 CAN
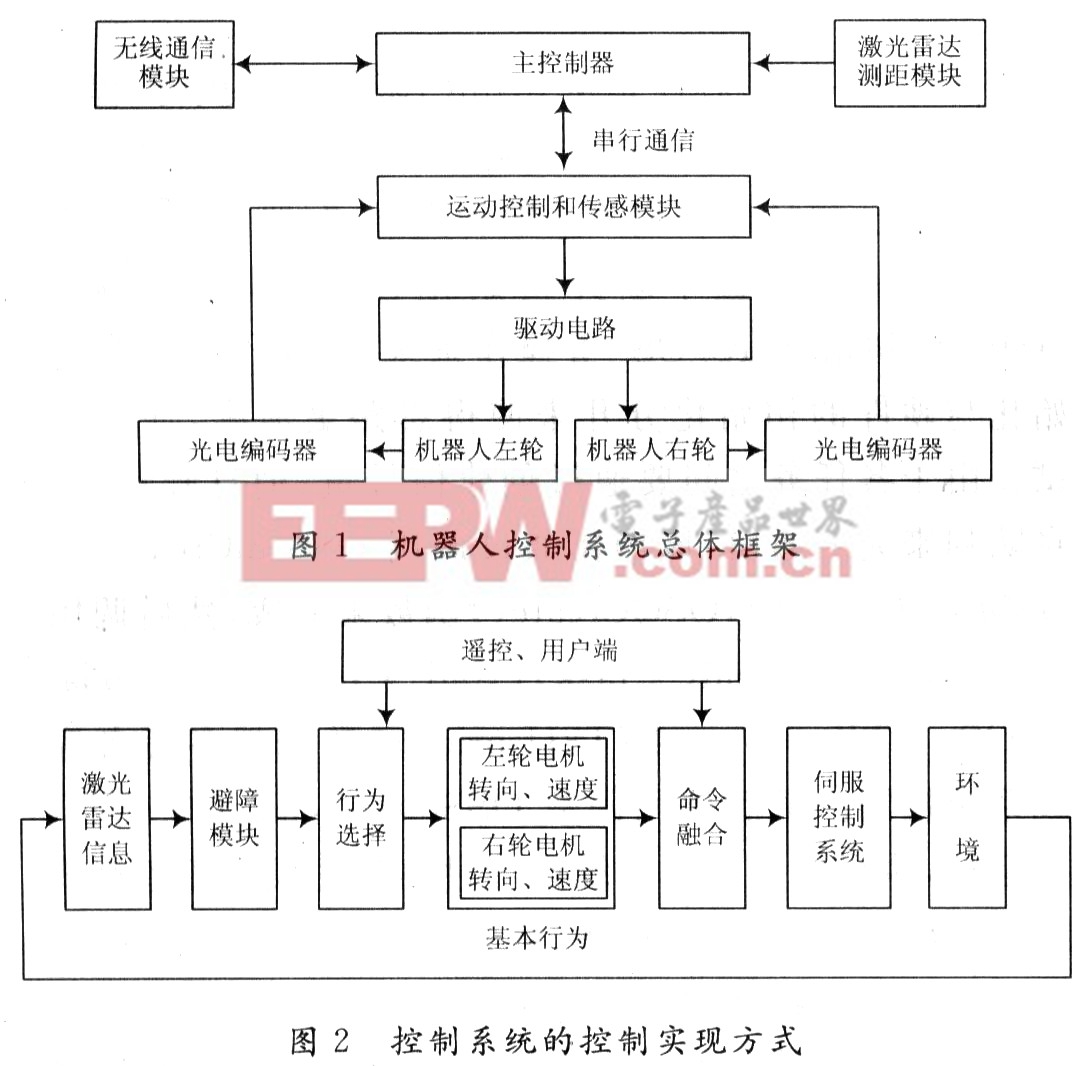
- 根据激光雷达跟踪测量定位理论,介绍一种基于μC/OS-Ⅱ的实时机器人控制系统。该控制系统采用分层分布式控制系统设计方案,主控制模块以S3C44BO为硬件平台,并以μC/OS-Ⅱ为软件平台,通过多任务划分,将整个系统功能分成多个按不同优先级的调度任务,以实现机器人不同功能的需求。伺服控制模块以TMS320F2812为控制器,并以PID为控制决策算法。性能测试表明,该控制系统控制精度高,稳定性好,系统响应迅速。
- 关键字:
控制系统 设计 机器人 雷达 激光 基于 转换器
- 基于现场总线的开放结构机械手控制系统是目前机械手控制的发展方向。文章通过对物料搬运机械手装置及其控制系统的介绍,提出了基于CAN总线的机械手控制系统方案,分析了控制系统的结构组成,并对在Windows98平台上用VC++6.0开发CAN总线控制系统软件进行了较为详细的论述。
- 关键字:
控制系统 机械手 总线 CAN 基于 CAN
通信协议:控制系统介绍
您好,目前还没有人创建词条通信协议:控制系统!
欢迎您创建该词条,阐述对通信协议:控制系统的理解,并与今后在此搜索通信协议:控制系统的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473