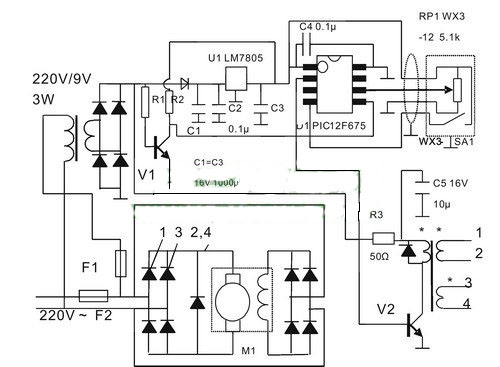
- 本文介绍一种无线遥控的微震电机震动转速控制电路,可以在无线遥控的方式下完成电机转速的启动、停止、加速、减速控制。 电路原理 微震电机(又称空心杯电机)具有体积小、震感明显的特点,常见的形状如图1所
- 关键字:
转速 控制 电路设计 震动 电机 无线 遥控 技术 基于
- 收音机模块TEA5767的C51控制程序, TEA5767采用I2C或者三线接口控制,我是用的I2C,单片机用STC89C52,带1K EEPROM,可以掉电存台,1602LCD显示. TEA5767读写数据都是5个字节,其中PLL参数14位,具体数据格式请看datasheet.以下程序中的函数可以直接在
- 关键字:
控制 程序 C51 TEA5767 模块 收音机
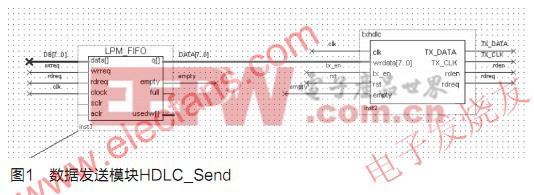
- 用FPGA+DSP实现HDLC(高级数据链路控制)功能, 引言 HDLC的ASIC芯片使用简易,功能针对性强,性能可靠,适合应用于特定用途的大批量产品中。但由于HDLC标准的文本较多,ASIC芯片出于专用性的目的难以通用于不同版本,缺乏应用灵活性。有的芯片公司还有自己
- 关键字:
链路 控制 功能 数据 高级 DSP 实现 HDLC FPGA

- 基于DSP芯片TMS320LF2407A的超声电源系统的控制电路, 本文利用高速TMS320LF2407A型DSP控制芯片设计了系统的控制电路,采用全桥逆变器作为超声振动系统的功率转换主电路,解决由于负载温度变化等原因产生谐振频率的漂移,保证系统的高效率。这里研究了粗精复合的频率
- 关键字:
系统 控制 电路 电源 超声 DSP 芯片 TMS320LF2407A 基于
- 为抑制无刷直流电动机的高度非线性和大量随机扰动,根据模糊优化的PID控制方法设计多变量的无刷直流电机(BLDCM)的控制方案。该控制方案采用模糊算法在线自动整定传统的PID参数,可用来设计多自由度机器人手臂关节控制器。详细阐述系统的组成和运行模式。实验结果表明,该控制方案使系统的响应时间和以前相比缩短50%,超调量降低5%,转矩扰动减小30%,更能有效地提高系统控制的精确度、柔韧性和鲁棒性。
- 关键字:
电机 控制 直流 PID 模糊 优化 基于
- 技术不断在向前迈进,新出品的电子元件简化了电动和控制器的设计,对於工程师开发电器用具设计并从无电刷电动机操作上得著莫大的好处是担当一个重要角色。 无电刷电动机(Brushless Motor)的应用设计越来越多都
- 关键字:
设计 实现 控制 电动机 电刷 传感器
- 本文介绍了LT3748主要特性,方框图以及25W/12V通信电源,汽车IGBT控制电源,plusmn;300V 绝缘反激转换器和输入24-96V输出48V/0.5A 电源。Linear 公司的LT3748是开关电源控制器,特别设计用于绝缘反激拓扑和大功率开
- 关键字:
开关电源 控制 技术 拓扑 绝缘 LT3748 设计 基于
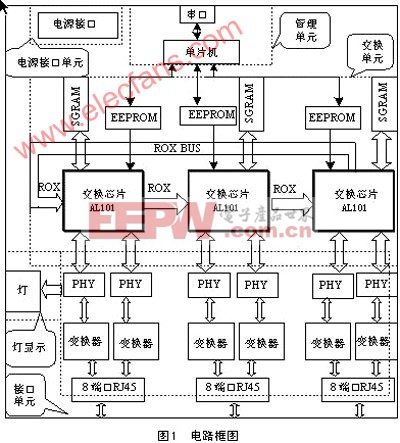
- 随着计算机性能的提高及通信量的聚增,传统局域网已经越来越超出了自身负荷,交换式以太网技术应运而生,大大提高了局域网的性能。网络交换机能显著的增加带宽,可以建立地理位置相对分散的网络。局域网交换机的每个
- 关键字:
交换机 设计 网络 控制 AL101 单片机 基于
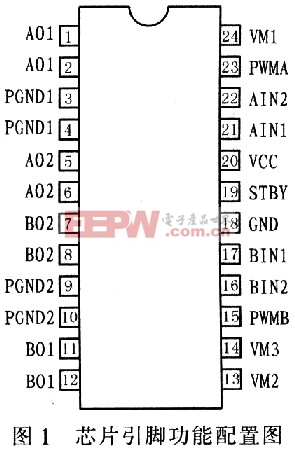
- TB6612FNG是一款新型直流电机驱动器,它具有集成度高、驱动能力强以及控制方式灵活等特点。利用这款器件和AVR单片机组成电机控制单元,通过试验得到其实际运行性能,并给出一些使用开发建议。将TB6612FNG应用在差速驱动的轮式移动机器人务统中,采用PID方式实现双电机调速控制,得到了良好的运行结果。
- 关键字:
设计 应用 控制 电机 直流 TB6612FNG
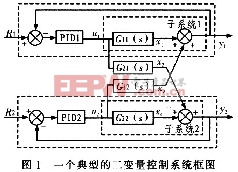
- 现代工业过程中面临越来越多的结构复杂的多变量系统,传统的单变量PID控制方法已无法满足要求,为了解决多变量系统的控制问题,以两输入两输出系统为例,提出一种基于阶跃响应的多变量频域模型辨识方法,并将此种方法与对角矩阵解耦控制方法相结合应用于多变量PID控制系统中。最后对滞后环节近似部分和对角矩阵解耦方法进行仿真验证。结果表明该方法能够更好的控制系统变量,误差减小50%以上。
- 关键字:
解耦 控制 研究 PID 及其 系统 辨识 变量
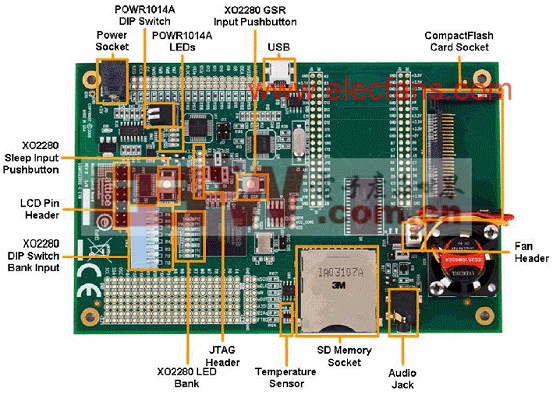
- 基于MachXO设计的PLD控制开发技术,MachXO PLD是非易失的可以无限次重新配置的可编逻辑器件PLD),具有256-2280个查找表(LUT),73-271个I/O,多达27.6Kb sysMEM嵌入区块RAM,多达7.7Kb分布式RAM,可编程的sysIOtrade;缓冲器支持LVCMOS 3.3/2.5/1.8/
- 关键字:
控制 开发技术 PLD 设计 MachXO 基于
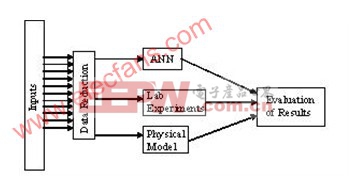
- 挑战: 创建一个用来监测大型造纸厂纸浆的生产过程,以节约能源和降低成本。 解决方案:为了增加吞吐量,节约能源,以及优化生产过程,我们利用NI LabVIEW数据记录和监控(DSC)模块来处理复杂的,非线性的建模过
- 关键字:
模块 纸浆 生产 控制 DSC 监控 NI LabVIEW 数据 记录
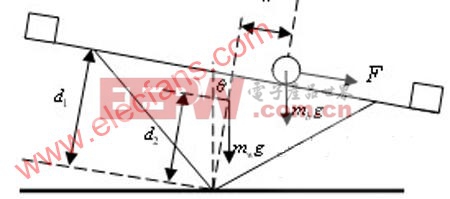
- 1引言 跷跷板系统是一个比倒立摆系统更为复杂,更接近于实际应用的典型控制系统。它具有严重的非线性、强耦合、对干扰敏感、模型过于复杂等特点[2-5]。跷跷板系统是由一部小车、一个直流伺服电动机、两个分
- 关键字:
控制系统 设计 跷跷板 控制 模糊 滑模 基于
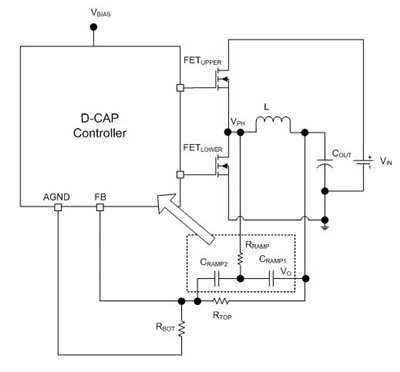
- 先谈谈CV操作模式,现在大部分芯片都是直接取样辅助线圈上电压,由于漏感的原因,在MOS关断后,也就是次级二极管导通瞬间,会产生一个尖峰,影响电压采样,为了避开个这个尖峰,大部分厂家都是采用延时采机,
- 关键字:
新手 必备 知识 控制 方面 电源
- 市场上可以买到的微功率 电源 芯片有以下几种控制模式: PFM、PWM 、chargepump、FPWM、PFM/PWM以及pulse-skipPWM、digitalPWM 其中常见的有PFM、PWM、chargepump以及PFM/PWM 1、PFM是通过调节脉冲频率(即开
- 关键字:
模式 比较 控制 不同 驱动 LED
控制。舵机介绍
您好,目前还没有人创建词条控制。舵机!
欢迎您创建该词条,阐述对控制。舵机的理解,并与今后在此搜索控制。舵机的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473