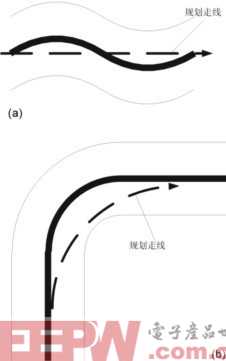
基于摄像头的预测控制策略 作者:上海交通大学自动化系 李颢 时间:2009-06-22 来源:电子产品世界 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> (a) (b) 图1 运动学模型和转向模型 运动学模型是描述智能小车位置、航向角、前轮转角之间动态变化关系的模型。转向模型是描述前轮转角自身变化时的动态关系的模型。运动学模型和转向模型可以描述成如下状态方程的形式: 其中,x、y表示智能小车的位置,ψ表示航向角,δ表示前轮转角,c=v/L(L为轴间距wheelbase),a=-1/T0(T0为转向舵机的响应时间常数)。 上一页 1 2 3 下一页












评论