弱磁控制及其与磁极位置的关系分析

2.1 磁极的相关概念
转子磁极(N极)的位置,称为磁极位置。
转子磁极(N极)与定子线圈α基准轴的夹角,称为磁极角。
在αβ基准坐标系中,基于电机编码器Z相脉冲ON上升沿时的转子磁极位置的角度,称为磁极码。(磁极码的定义基于不同的控制方式会有所差异)
2.2 弱磁控制与磁极位置的关系
电机磁极码的正确与否,会直接影响控制系统对电机磁极位置的确认,从而影响弱磁控制的实际效果,因此,我们需要研究其相互关系,并加以利用。
由于工程应用现场的电机磁极码自学习存在一定的误差,这使得磁极码将出现三种情况:
一是磁极码反映的角度刚好正确,控制系统能正确认知电机磁极位置;
二是磁极码反映的角度比电机实际磁极位置超前;
三是磁极码反映的角度比电机实际磁极位置滞后;
下面将会对上述三种情况进行详细的分析。
情况一:磁极码反映的角度刚好正确。
从图3可知,在dq坐标系中,电机相电流Im1、Im2、Im3的幅值是相等的,图3中的圆可认为是基于功率守恒(电机功率公式见式4)的电流等幅圆。Id*与Iq*分别是电机d轴、q轴的电流指令给定值。Im与Id*、Iq*的关系如式5。Iq*完全等于力矩电流Itrq。
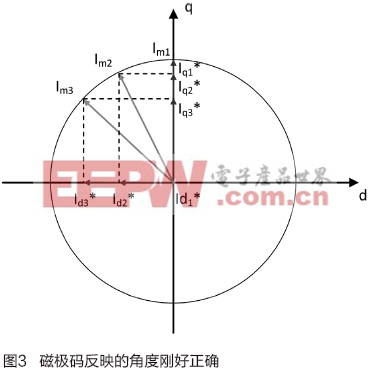
以11kw额定电流为25A的电机为例:
①当Id1*=0时,Iq1*=25A额定值,此时电机的输出力矩也是额定力矩;
②当Id2*=-10A时,Iq2*≈23A,加入了Id2*之后,为了使Im2的幅值不变,则与Iq1*相比,Iq2*要变小。
③当Id2*=-15A时,Iq2*=20A,加入了更大的Id3*之后,为了使Im3的幅值不变,则与Iq2*相比,Iq3*要变得更小。
另外,如果加入了Id*之后,电机的负载力矩不变的话,Iq*则不能变小,则会导致Im增大,从而导致输出功率不守恒,电机过负荷运作。
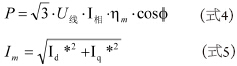
情况二:磁极码反映的角度比电机实际磁极位置超前。
如图4所示,由于磁极码不正确,此时的Iq*、Id*与Itrq的关系如式6。
![]()

逆变器相关文章:逆变器原理
可控硅相关文章:可控硅工作原理
逆变器相关文章:逆变器工作原理
比较器相关文章:比较器工作原理
矢量控制相关文章:矢量控制原理




评论