基于MSP430单片机的PID参数整定义

本文研制的便携式PID参数整定仪主要具备如下功能:
(1)模拟信号输入。能够采样接入标准的4~20mA电流信号,方便信号的处理。今后在此基础上可以进行扩展,从而使其能够接收更多的标准信号。
(2)模型辨识部分。设系统模型为二阶加滞后模型,采用基于频域的模型便是算法辨识出系统模型。
(3)PID参数的计算。根据辨识的模型,运用幅值相位裕度法与RGA失调因子法完成。
对PID控制器的自整定算法;其中幅值相位裕度法整定公式为:
其中T为时间常数,Am为幅值裕度,φm为相位裕度。通常情况下一般取Am≥2,φm=30~60°。
RGA失调因子法整定公式为:

(4)人机交互接口。能通过键盘进行参数的设置、修改,并且能够将实时信息以及整定的结果等通过LCD显示。
这些功能组合构成了便携式的PID参数自整定器。
3 PID参数整定仪的硬件电路设计
多变量便携式PID参数整定仪由于其可以随身携带,所以我们采用3.3V电池对其供电。这就要求装置尽量保持低功耗以延长电池寿命,MSP430单片机正是由于其低功耗而被广泛采用,因此选择MSP430F169作为PID参数整定仪的控制器。
MSP430F169具体特性如下:
(1)低工作电压范围:1.8~3.6V;
(2)超低功耗,五种省电模式;
(3)从待机模式唤醒6μs;
(4)3通道DMA,12-Bit A/D转换器,双12-Bit D/A同步转换器;
(5)串行通讯接口(USART0),功能如异步UART或同步SPI或I2C;
(6)串行通讯接口(USART1),功能如异步UART或同步SPI;
(7)具有可编程电平检测的供电电压管理器/监控器;
(8)串行在线编程,无需外部编程电压,可编程的安全熔丝代码保护;
(9)MSP430F169.60KB+256B Flash Memory,2KBRAM;
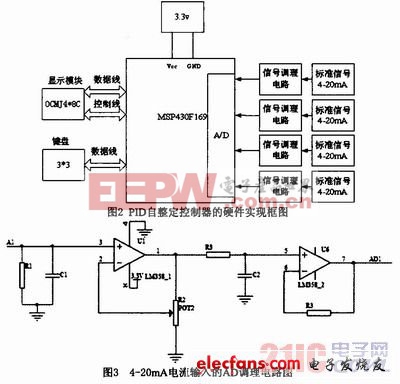
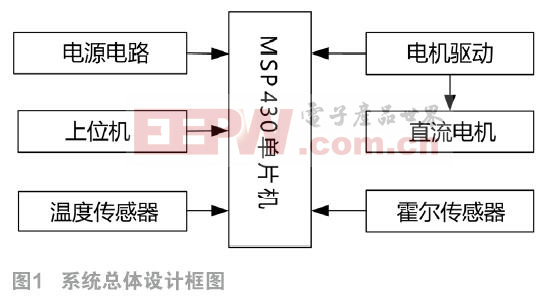
本整定仪适用于任何过程而不用管其暂态类型。根据PID参数整定原理和功能,系统的硬件框图如图2所示,图3给出了4~20mA电流输入的AD调理电路图。

评论