基于元胞自动机的增强现实标记识别算法

增强现实系统 中标记识别一直是增强现实系统的瓶颈,占用了系统处理的大部分时间,即使采用规则几何形式的标记,对于实时要求很高的增强现实系统而言,其识别算法的效果和实时性也是不理想的,因此提出了一种利用应用元胞自动机模型,利用给定的演化规则,改进在增强现实系统中标记识别的算法,并在ARTOOLKIT系统中做了具体实现。实验结果表明,改进的算法的实时性和识别效果均有了很大的提高。
0 引 言
增强现实技术(augmentedreality,AR),是随着虚拟现实技术(virtual reality,VR)迅速发展和实际应用需要而出现的一种将真实世界信息和虚拟世界信息“无缝”集成的新技术。增强现实系统是使用了增强现实技术的应用系统。其重要特点的有:用户拥有沉浸感,虚拟环境与实际环境融为一体,几乎感觉不到真假融合所产生的不和谐;系统具有交互性,用户可以通过交互设备直接与虚拟物体或虚拟环境进行交互:是在三维空间中增添定位虚拟物体,它的研究涉及系统结构、人机接口、三维注册、头盔显示等方面。利用标记实现虚拟物体的精确注册已经是一种较成熟的技术了,并在室内、室外到移动应用等环境都得到了广范应用。其中标记识别一直是增强现实系统的瓶颈,占用了系统处理的大部分时间,即使采用规则几何形式的标记,对于实时要求很高的增强现实系统而言其识别算法的结果和 实时性也 是不理想的。
元胞自动机(cellular automata,CA)是一时间和空间都离散的动力系统。散布在规则格网中的每一元胞(Cel1)取有限的离散状态,遵循 同样的作用规则,依据确定的局部规则作同步更新。大量元胞通过简单的相互作用而构成动态系统的演化。不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间和空间上都是局部的。
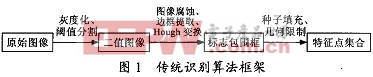
1 传统识别算法
视觉标记的识别过程包括输入图像、输出图像标记的包围框和特征点的坐标。这个过程的设计要求是具有较好的精度,满足实时性要求,其中实时性要比精度更重要一些。标记的识别中,一般可以利用的信息是标记的边缘信息、几何信息、色度信息 。如图 1所示。首先将图像转化为二值图像,然后利用 腐蚀 、边框提取和 Hough变换等 技术获得标志包围,再经过种子填充和几何限制等手段取得特征点集合。
2 采用CA模型的算法
CA识别算法如图2所示,可见算法的效率高低取决于CA模 的设计。本文采用的CA模 犁如下:

2.1 元胞空间
假设元胞空间由二维 M*N个像素构成。并假设是时间同步的。定义一幅M~N大小的二维图像
![]()
式中:M,N分别表示图像的高和宽。Aid')表示( 点的状态值(也即灰度值)。对于k值图像,( 在状态集![]() 取值。含有标记的视频图像如图3所示。
取值。含有标记的视频图像如图3所示。

邻居模式采用摩尔型。每个元胞构成如下:每个元胞由4个分量构成:GCell(c,p,e,v),其中C表示灰度,为简单起见,先利用阀值进行了二值化,得到 0或 1。要注意在其过程中消除孤立点 ,不然会影 响识别效果 。P表示是 否是边缘点,如 是边缘点则为 1,否则为 0。e表示是否是边 ,如是则为 1,否 则为0。v表示是否 为顶点 ,如是 则为 1,否 则为 0;i表示是否 为标记内部特征点,如是则为 1,否则为0。采用二值表示,简化了操作。系统初始矩阵如下

评论