采用微波多普勒雷达的高级运动传感器

早期设计引入了触摸式固态交流开关。新版本通过先进的人类雷达感测系统进一步推进这一概念,该系统还可配置为物联网和智能自动化。该系统使用70%的印度零件,完全由印度制造。
其核心是一种微波多普勒雷达传感器,能够以远高于传统PIR或红外系统的可靠性检测人体运动。与依赖热源且常在阳光下、加热器附近或窗帘后故障的PIR传感器不同,微波雷达能提供更优越的穿透非金属障碍物,免疫热诱发的误触发,降低对小型动物的敏感度,并实现全方位探测且无需直接视线。
大多数运动开关依赖PIR传感器且经常导致误触发,而这种基于雷达的系统消除了此类问题。它还集成了LDR,仅在低光或夜间条件下工作,非常适合自动化照明系统。图1展示了原型设计。

图1:作者原型设计
系统组件的选择确保尽可能提供印度替代品,实现设计中超过70%的本地化。表1列出了物料清单,包括零件名称、编号、制造商及适用的印第安替代选项。
| 表1:材料清单 | |||||||
| 名称 | 标识符 | 覆盖范围 | 数量 | 型号 | 制造商 | 印度替代品编号 | 印度制造商 |
| 100nF | C3 | C1206 | 1 | CC1206KKX7RYBB104 | YAGEO | 1206B104K251CT | Walsin |
| DB301V-3.5-2P-GN | CON1,CON2 | 康涅狄格-TH_DB301V-3.5-2P-GN | 2 | DB301V-3.5-2P-GN-S | DORABO | TL001R-3.5-2P | Connectwell |
| FPC连接器 | FPC1 | OV2640 FPC 24P | 1 | AFC01-S24FCA-00 | JUSHUO | ZF5S-24-01-T-WT | 印度Samtec电子 |
| VO2223A-X007T | IC1 | DIP-8_7P-L9.7-W6.4-P2.54-LS7.6-BL-PE7 | 1 | VO2223A-X007T | VISHAY | VO2223A-X007T | VISHAY |
| 120Ω | R1 | R0603 | 1 | 0603WAF1200T5E | UNI-ROYAL | CRCW0603120RFKEA | VISHAY |
| 100Ω | R3 | RES-SMD_L6.4-W3.2-R2512 | 1 | SR2512FK-7W100RL | YAGEO | 100Ω SMD 电阻 | HTR-印度、瓦茨电子、Kusum/KOHM |
| RCWL 0516 | U1 | RCWL-0516 | 1 | RCWL-0516 | 匿名 | 匿名 | |
| 异地 | U2 | UNIVIBE 灯-LDR ARRANGEMENT_LDR3 | 1 | 匿名 | 匿名 | ||
| LD05-23B05R2_C42432360 | U4 | PWRM-TH_LD05-23BXXR2 | 1 | LD05-23B05R2 | LZTEC | RECOM RAC05-05SK | RECOM Power India 私人有限公司 |
| 物联网板 | MOD1 | 匿名 | ESP S3, Arduino IoT Kit | IndusBoard Coin V2 | IndusBoard V2 | ||
人类雷达运动开关——连接与模式
在该升级版本中,原本的光耦合器和三极双向可控集成电路被一个集成光控座的集成电路取代,该集成器结合了这两种功能。该元件由印度制造商采购,可直接驱动110-230V范围内最高1A RMS的交流负载,符合VO2223A数据手册的规定。
该功能使得住宅和商业环境中标准LED和CFL灯泡能够自动控制。FPC连接器允许与开发板(包括IndusBoard Coin)接口,扩展了基于物联网的人机雷达感测或固态继电器应用的功能。
这种紧凑设计支持多种作模式,支持独立使用或全面集成物联网。
RCWL微波多普勒雷达利用多普勒效应探测人类存在。可选的LDR输入支持仅夜间作,白天关闭灯光,夜间检测到运动时自动激活灯光。
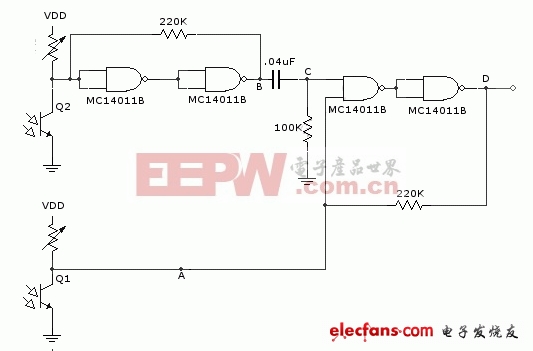
根据光控器数据手册(见图2),三向双向可控器可以通过8号和6号脚直接驱动交流灯泡。感性负载时可添加缓冲电路。图2展示了VO2223A配置电路。

图2:VO2223A数据表

图3:模式1的焊点跳线配置

图4:模式2的焊点跳线配置
设计包含用于物联网板集成的FPC连接器,可配置为四种模式:模式1、模式2、模式3和模式4。
模式1:人类雷达SSR模式
在此模式下,三点焊锡跳线JP1短路,根据传感器检测到的人体运动触发光控器。在此模式下,JP1=1和2短路,JP2=1和2短路。
在这种独立配置下,该电路作为全自动的动作激活灯开关工作。RCWL-0516雷达传感器利用多普勒效应检测人体运动,在被探测后,输出引脚输出约三秒钟。该信号通过焊锡跳线JP1直接传输到光控器(VO2223A-X007T),JP1会短路引脚1和3。如图3所示,绿色线从雷达输出延伸至JP1,再到R1=120Ω和光控铳拔针1。光控器内部的三端双向正管(引脚4-6)通过CON2连接器驱动交流负载,如LED或CFL灯泡,最高可达1A RMS。
缓冲网络(R3=100Ω,C3=100nF,跨越4-6脚)确保稳定工作,尤其适用于电阻负载。CDS引脚可以保持开启,也可以通过10kΩ分压器连接到LDR,仅用于夜间作。此模式下无需FPC连接,适合基础家庭照明自动化。当JP1短路时,该电路作为独立的动作感应灯开关。雷达传感器输出直接驱动光控器,检测到运动时会打开连接的灯泡。
模式2:人类雷达传感器模式
在此模式下,主板作为专用的运动传感器和警报单元,绕过SSR部分,通过FPC连接器进行外部控制。焊点跳线 SJ1(引脚 1 与 OUT 引脚桥接,如图 4 所示)将雷达的 OUT 信号直接路由到 FPC 引脚 1,而 JP1 则保持开启。这使得RCWL-0516传感器发出的人体运动信号可以发送到外部控制器,如IndusBoard Coin,用于处理或触发警报。在此模式下,JP1=2和3短路,JP2=2和3短路。
要在外部激活SSR,将MCU的I/O引脚(例如IndusBoard的3号引脚)连接到光控触发输入端。在这种配置下,雷达传感器输出通过FPC连接器发送到外部控制器,用于基于运动的警报或控制,SSR被绕过。
模式3:物联网SSR(固态继电器)模式
在这种模式下,板子作为远程控制的固态继电器运行,绕过雷达传感器,实现基于物联网的直接控制。焊点跳线JP2在第1-2脚(如图5所示)短路,以便通过FPC连接器触发光控器,通过IndusBoard的I/O引脚4。IndusBoard通过无线方式发送控制信号,例如通过MQTT应用或物联网仪表盘,切换连接的交流负载(例如灯泡)的开关。在此模式下,JP2=2和3短路。

图5:模式3的焊锡跳线配置

图6:模式4的焊点跳线配置

图7:最后一圈
内置缓冲网络确保交流交换的清洁和稳定。JP2短接在第1和第2脚之间,通过IndusBoard信号实现SSR的远程作,实现基于物联网的连接负载控制。
模式4:人类雷达物联网SSR+传感器模式
在这种混合模式下,电路结合了基于运动的自动控制和基于物联网的监控,实现了先进的自动化。人为动作触发本地SSR切换,同时通过FPC连接器向IndusBoard发送状态更新,提供传感器和光照状态反馈。所有跳线短路。
配置JP1短路(雷达输出转光控器输入)和SJ1桥接(输出转IO3用于传感器反馈)。如果需要通过IO4远程控制,JP2也可以短路。雷达的OUT信号有两种方式:本地路由至光控器以便即时切换,以及通过IndusBoard的FPC引脚IO3进行“检测到”运动等警报。光(光)状态可以通过IO4镜像回来,实现实时物联网仪表盘更新。
可选的LDR可连接到CDS引脚,仅用于夜间激活。
参见图2的双径配置(JP1和SJ1短路),图3中FPC引脚分配(引脚3-4为主动,引脚25-26引出VDD/GND,以实现3.3V/5V兼容性)。
模式4将雷达传感与物联网控制相结合。雷达输出驱动本地SSR,同时将运动和光照状态传达给IndusBoard进行监测或远程控制。
上述四种模式代表不同的功能设置。图7展示了运动传感器系统的最终电路。为雷达传感器、IndusBoard和光隔离器供电时,通过安装在PCB上的交流-直流转换器获得直流电源。交流输入连接到螺丝端子CON1,而负载(如灯泡或低功率风扇)连接到CON2。
印刷电路板设计
最终系统的PCB设计通过多层布局和SMT组件保持尽可能紧凑。顶层包含雷达模块、光控器及其他独立组件,底层则容纳交流-直流电源转换器和连接器。
紧凑的多层PCB布局将交流和直流段分开,以确保安全并减少干扰,同时使用贴片处理元件以提高空间效率。
测试人类雷达运动开关
测试时,首先如图1所示组装PCB上的所有元件。将交流电源线连接到螺丝端子CON1,将负载(如灯泡)连接到CON2。根据焊点跳线配置,如果设置为特定模式,系统会根据动作检测自动开关灯。当雷达传感器模块加装LDR时,电路仅在低光或夜间条件下根据运动运行。同样的原理也适用于其他模式配置。
对于物联网功能,使用FPC连接器连接IndusBoard Coin。




评论