基于STM32的四旋翼飞行器控制系统

2.4 电机驱动模块
2.4.1 电机驱动原理
本设计选用直流无刷电机作为飞行器的动力驱动设备。根据无刷直流电机的换向原则,无刷直流电机的控制形式分为:开环控制、转速负反馈控制和电压反馈加电流正反馈控制。其中,开环控制无反馈进行校对,应用于转速精度要求不高的场所;转速负反馈控制的机械性能好;电压反馈加电流正反馈控制一般应用在动态性能要求高的场合。针对本设计来说,需要实时调整电机的转速,并且调速频率比较大,所以在本设计中采用电压反馈加电流正反馈控制方法。
2.4.2 电机驱动电路设计
根据电机控制原理,本设计将电机驱动电路划分为三个部分:微处理器、反电动势检测和功率驱动部分。
(1)微处理器
由于无刷直流电机的换向频率比较高,不宜使用低频率的处理器,再加上电机的旋转会产生旋转的磁场,对处理器有很大的干扰。通过比较,本设计采用ATMEGA8单片机作为电机驱动微处理器。
(2)反电动势检测
在换向的过程中,需要不停地检测转子的位置,通过转子产生的反电动势就可以知道转子的位置信息,通过分压衰减原理,检测电机三相反电动势电压相对中性点的电压,从而确定转子的位置。反电动势检测电路如图5所示。
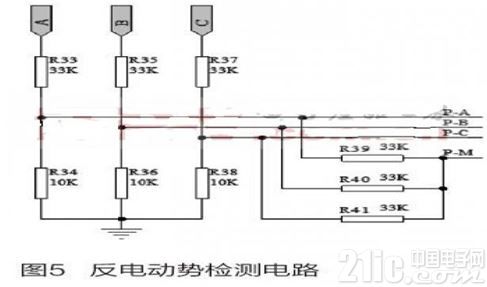
其中,A、B、C端子为电机三相电压,R33~R38为分压电阻,P-A、P-B、P-C分别三相反电动势对应电压,P-M为中性点电压。
(3)功率驱动
功率驱动是为了给电机提供大的电流,使其达到能够稳定运行的目的,本设计采用并联MOS管提高输出的电流,在每一相上桥臂并联3个P沟道MOS管,达到三相全桥可控的目的,在每一相的下桥臂上也并联3个N沟道MOS管。
3 硬件系统调试
3.1 PWM控制飞行器驱动电机调试
通过对4个电机进行通电,加上不同占空比的PWM波形,来控制电机的转速,记录电源电压、电流的变化情况,在稳定输出11.1V,不同的占空比下,电源电流变化情况如表1所示。

由表1可知:占空比越大,电机驱动工作需要的电流越大;在占空比达到接近极限值时,电流输出变化很小,实验表明硬件系统能够可靠运行。
3.2 无线通讯调试
通过测试无线的连通性、传输距离和丢包率,来确定无线模块的性能特性。把遥控器设置为发送模式,地面站设置为接收模式,利用地面站的报警灯来指示接收的状态,成功接受一次闪一下,通过改变遥控器和接收机之间的距离,记录一分钟内指示灯闪烁的次数,来评估无线传输质量;测试分别在教学楼楼道和空旷操场进行,详细记录见表2。
由表2可知:无线通讯在15m之后的传输效果有明显下降,这是由无线通信模块的功率决定的,实验表明无线通信部分在设计需求范围内能够可靠运行。
3.3 综合调试
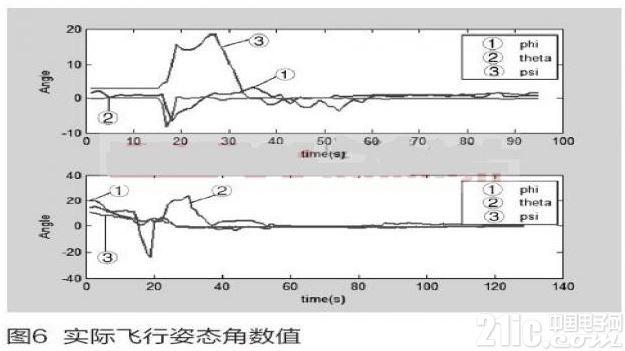
图6为PID控制算法下载到四旋翼飞行器控制器进行实际飞行控制的姿态曲线图,其中①代表横滚角,②代表俯仰角,③代表偏航角。图6为飞行器受到侧风干扰后,姿态角受控重新收敛到平稳(0,0,0)状态的角度数据。下图为飞行器从某一个姿态受控收敛到平稳(0,0,0)状态的角度数据。从实验结果可以看出系统能稳定运行。
4 结束语
完成了四旋翼飞行器控制系统方案设计以及系统各个模块硬件器件选型和电路设计,进行了系统硬件电路的调试,实验结果表明,系统能够稳定、可靠运行。
- STM32单片机中文官网
- STM32单片机官方开发工具
- STM32单片机参考设计







评论