SIGLENTSDS2000总线协议解析

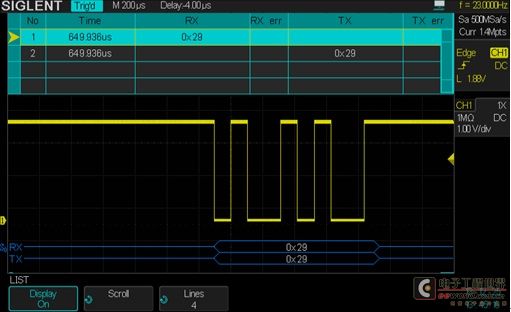
在解码的16进制数据中:数据值显示在帧内,以白色表示。支持4~96位数据显示。RX接收数据。TX发送数据。
在解码列表中:Time(时间戳)当前数据相对于触发位置的水平位移值。RX接收数据值。TX发送数据值。RXerr接收数据时,出现奇偶校验错误或未知错误。TXerr发送数据时,出现奇偶校验错误或未知错误。
CAN总线协议
CAN(ControllerAreaNetwork),即控制器局域网络,主要用于各种过程(设备)监测及控制,广泛应用于汽车行业。CAN总线的报文传送由4种不同类型的帧表示和控制:数据帧、远程帧、出错帧、超载帧。其中数据帧由7个不同的位场组成,即帧起始、仲裁场、控制场、数据场、CRC场、应答场和帧结束。

将示波器连接到CAN-H或CAN-L信号,然后指定输入信号阀值电压电平。在将示波器设置为捕获CAN信号后,可以指定CAN-H或者CAN-L上帧的开始条件、远程帧ID、数据帧ID和数据帧ID+任意数据,设定波特率。
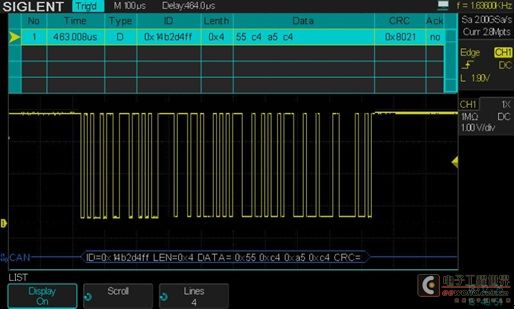
在解码的16进制数据中:ID,LEN,DATA,CRC显示在帧内,以白色表示。
在解码列表中:Time(时间戳)当前数据相对于触发位置的水平位移值。Type帧的类型,可显示数据帧(用“D”表示)或远程帧(用“R”表示)。ID帧ID,将自动检测为11位或29位帧。Length数据长度。Data数据字节。CRC循环冗余校验。Ack确认位。
LIN总线协议
LIN(LocalInterconnectNetwork),即局部互联网,是面向汽车低端分布式应用的低成本、低速率、串行通信总线。是CAN总线的下层网络。

将示波器连接到LIN信号,然后指定输入信号阀值电压电平。在将示波器设置为捕获LIN信号后,可以指定LIN上的开始信号、帧ID、帧ID+数据或帧错误上触发,设定波特率。
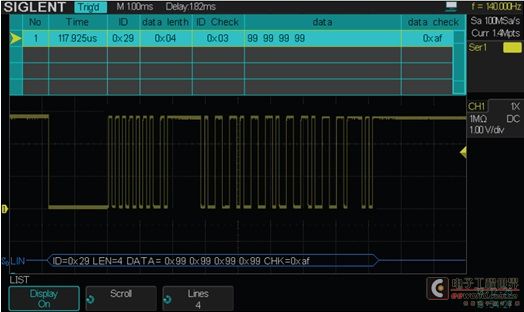
在解码的16进制数据中:ID,LEN,DATA,CHK显示在帧内,以白色表示。
在解码列表中:Time(时间戳)当前数据相对于触发位置的水平位移值。ID帧ID。Datalength数据长度。IDCheckID奇偶校验。Data数据字节。Checksum数据校验和。

评论