机器人技术电路设计图集锦

器发射超声波。
本文引用地址:https://www.eepw.com.cn/article/201612/326690.htm图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器 MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。 U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
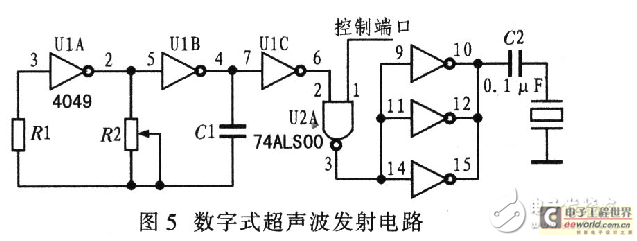
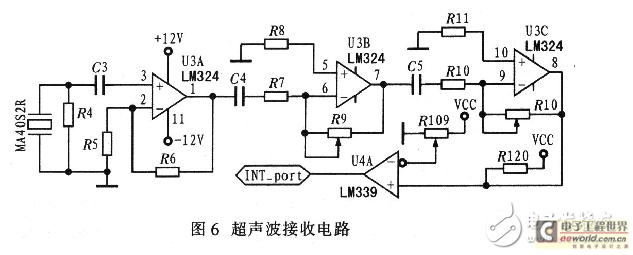
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
根据竞技机器人的功能要求进行总体设计,将各个功能进行模块化,其控制系统硬件框图如图所示。中央处理器采用微控制器结构,用以控制外围设备协调运行。舵机控制机器人的运动方向;驱动电机电动机采用输出轴配有光电编码器的小型直流电机驱动车轮旋转。电磁铁作为机械手夹紧的执行元件。设置了两路超声波传感器、8路光电检测输入和8路开关量检测接口。
TOP6 机器人接触式物体探测技术电路设计
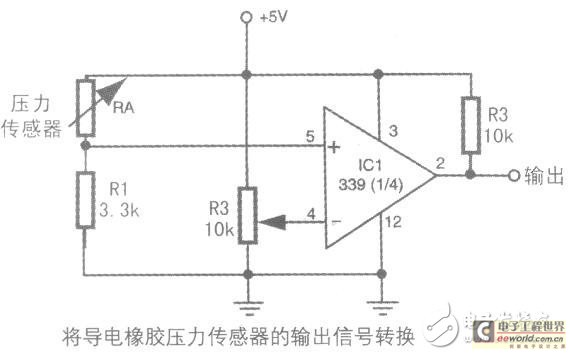
下图中给出使用导电橡胶片的比较合理的接口电路。导电橡胶片和一个3.3k电阻串联在地与电源正电压之间形成了分压器。当导电橡胶片受压时,传感器的输出端的电压就会变化。传感器的输出端就是压电片和电阻之间的一点,此信号连接到比较器339的反向输入端引脚上。当压电片的电压超过了比较器的参考电压时,比较器输出状态改变,就表示碰撞发生了。这个比较器的输出可以用来驱动一个控制马达方向的继电器上或者直接连接到一个微处理器或计算机端口上。
多路碰撞开关
当有许多开关或者近距离探测设备布置在机器人的周围时会怎样呢?不得不把每个开关的输出连接到电脑里,但是那样做浪费了很多外设端口。一个比较好的解决办法是利用一个优先编码器或者多路转换器。这两个方案允许在一条公共控制线路上连接多个开关。机器人的微处理器或计算机将查询这条控制线,而不是每个开关或近距离探测设备。
使用优先编码器电路设计
下图中的电路使用了一块74148优先编码器集成块。
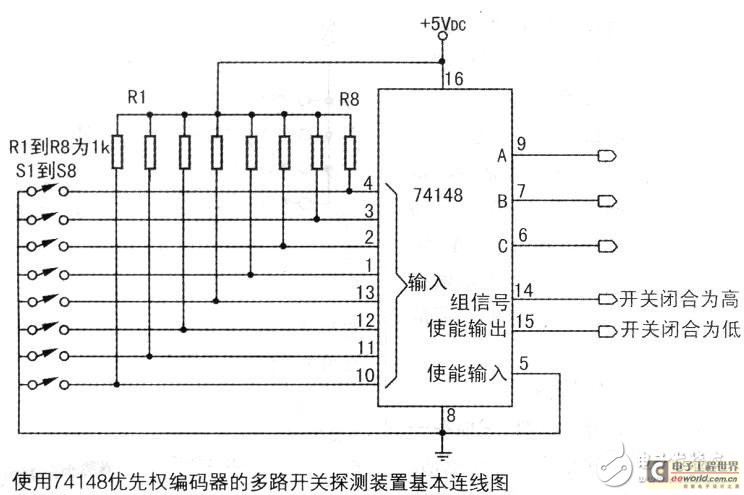
集成块的输入端就是那些开关的输出。 当一个开关闭合,相应的二进制编码就会出现在A-B-C输出引脚处。对于优先编码器,只有开关中最高的值才能在输出端显示出来。换句话说,如果开关4和7都闭合了,那么输出端只能反应引脚4闭合。
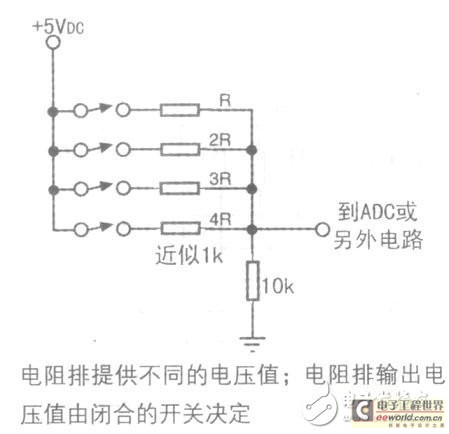
使用电阻分压排电路设计
如果机器人的计算机或者微控制器中有模一数转换器(ADC)或者可以添加一个,就能以另一种技术实现多路开关接口:电阻分压排。概念十分简单,像图18 所示。每个开关通过一个电阻的一端接地,而+V电压串接另一电阻到各开关上。多个开关则并行接入ADC的输入端,如图所示。这些电阻形成了一个分压器。由于每个电阻值都不同,所以当某一开关闭合时,对应的电压值都是独一无二的。注意,由于电阻是并联的,所以一次可能有多个开关闭合。从而得到一个中间值。要对连接每个开关的电阻值进行摸索实验以获得最大的灵活性。
TOP7 智能跟随红外发送接收电路设计
系统的智能跟随功能是通过红外实现的,音乐机器人上的红外接收器感知到红外线时,会追踪红外发射源,感知不到时,会原地旋转重新搜索红外发射源,直至 重新 定位方向。红外发射源是由10 个红外发射管组成,将10 个红外发射管均匀摆放在一个球体表面,使得红外发射源可以向四面八方辐射红外线,保证音乐机器人更加快速准确地寻找到红外发射源。红外发射管发射的载波频 率为38 kHz 占空比为50%的方波。红外的发射和接收电路如图4所示,10.0 连接一个普通I/O 引脚,控制红外线的通断,即接通4 ms,然后关断11 ms,反复进行接通与关断。 连接一路PWM 方波,方波的频率是38 kHz.一共有10 路红外发射管。
红外接收装置采用2 个红外接收器1838,分别安装在音乐机器人的头部和尾部。两个接收器的输出引脚分别连接单片机的10.2 和10.7 引脚。红外接收器1838 对38 kHz 频率的红外线敏感,所以红外接收器1838 可以检测到红外发射源的方位,从而驱动电机向外发射源的方向前进。
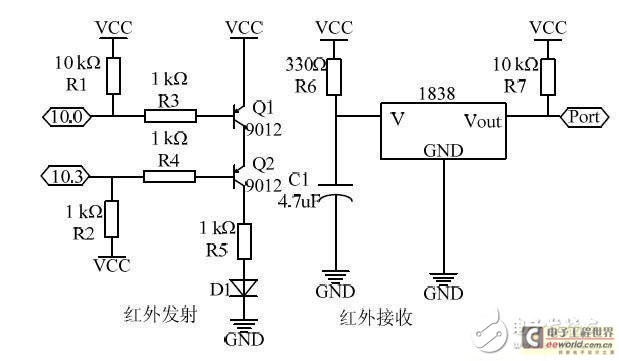
图4 智能跟随红外发送接收电路
拍手信号捕获电路设计
电路利用麦克风采集声音信号,然后利用LM324 对采集来的信号进行比例放大,放大的比例为100 倍,然后接过两个1N5819 和一个104 独石电容进行包络线检测,最后利用LM358 作为电压比较器,利用1 K 电阻和880Ω电阻分压获得比较电压值,其电路如图5 所示。机器人的移动采用驱动直流电机带动轮子转动实现,即控制直流电机的正反转和速度,系统直流电机驱动芯片采用SGS 公司的L298N,内部有4 通道逻辑驱动电路。用三极管组成H 型平衡桥,驱动功率大,驱动能力强。同时H 型PWM 电路工作在晶体管的饱和状态与截止状态,具有非常高的效率。
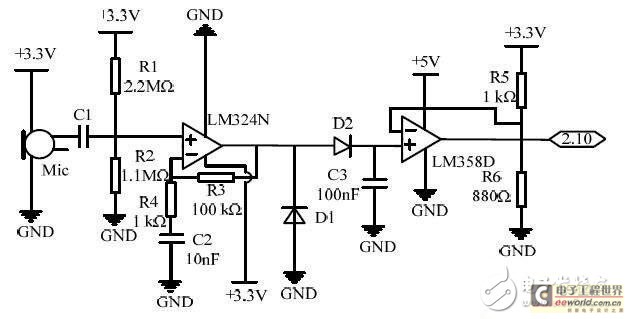
图5 拍手信号捕获电路
直流电机驱动电路设计
电机的转速取决于3 个因素:负载、电压和电流。对于一个给定的负载,可以通过脉冲宽度调制的方法来使电机保持稳定的速度。通过改变施加在直流电机上的脉冲宽度,可以增加或减小电机的转速。调整脉冲宽度,即改变占空比,调整电机的速度。驱动板采用6 个高速光耦6N137 实现驱动电路与逻辑电路的隔离,这样可以有效地避免驱动电路与逻辑电路之间的相互干扰。驱动板的电路原理图如图6 所示。
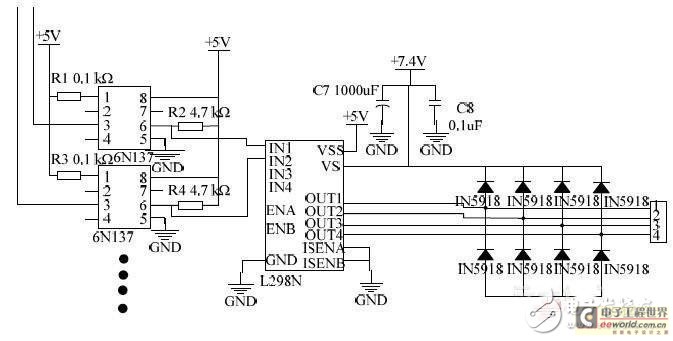
图6 直流电机驱动电路
通过软件编程可以自由改变单片机两路PWM脉冲信号的占空比,电机的A 端连接PWM 脉冲信号,电机的B 端连接单片机的一个I/O 引脚。当这个I/O 引脚置1 时,电流从电机的B 端流向电机的A 端;当这个I/O 引脚置0 时,电流从电机的A 端流向电机的B 端,这样电机就可以改变电机旋转方向,同时控制PWM 脉冲信号的占空比值还可以改变电机旋转速度,实现转向和转速的控制。
TOP8 吸尘机器人控制系统电路设计
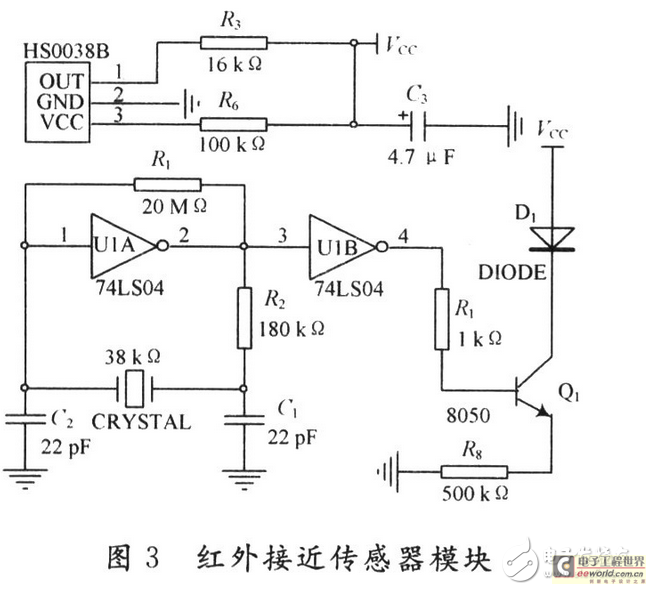
红外接近传感器电路设计
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。吸尘机器人的近距离红外接近传感器由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便可以判断物体的有无。
两种电机控制系统电路设计
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为了实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
H桥式驱动电路是比较常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图所示。
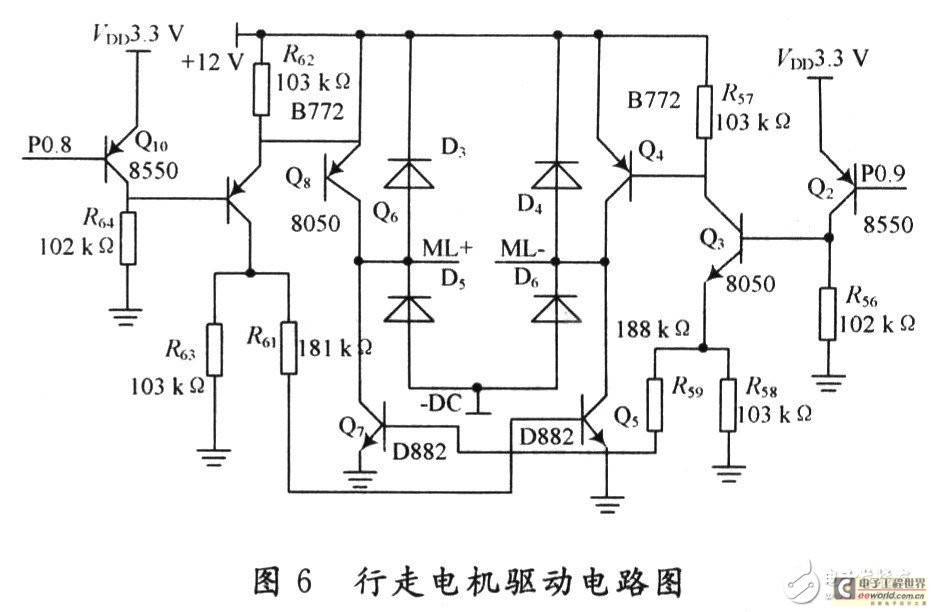
用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,可以控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行检测。通过航位推算可以实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离即可算得。
清洁机器人作为服务机器人的一种,有着巨大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的不断进步,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术支持。若读者对机器人技术感兴趣,不妨多探讨一下未来发展趋势以及最新革新技术走势等等。
TOP9 基于AT89C52自动追踪红外线源机器人电路设计
红外线传感器电路下见图。在机器人左、中、右三个方向放置传感器以检测红外线发射源的位置,当某个传感器接收到红外线源后输出一个下降沿至74121的 4脚A2端,根下据图中电容C4、C5

评论