GPS接收机载波跟踪环路设计

5.3 载波跟踪环仿真及分析
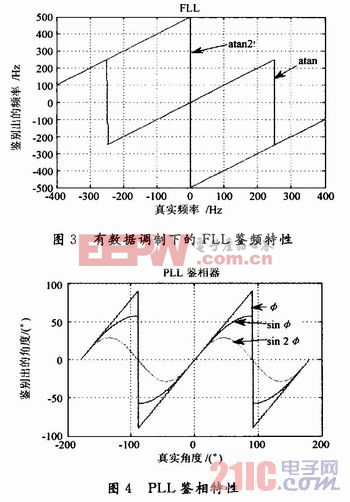
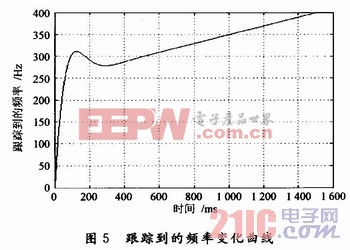
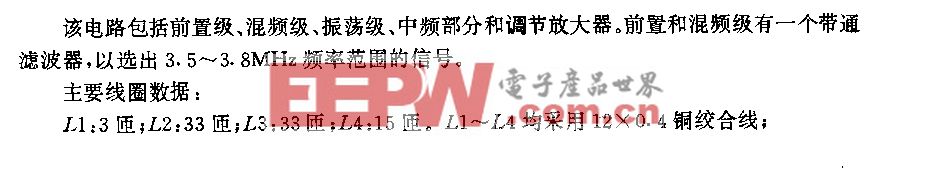
根据5.1和5.2节的仿真结果,FLL选择二象限反正切鉴别器,PLL也选择二象限反正切鉴别器。将鉴别器结果送入图2所示的环路滤波器,滤波结果送给数控振荡器,形成图1所示的闭环模式。接收机捕获时采用时域和频域二维搜索算法,根据FLL鉴别器的频率鉴别范围,设定频率搜索步长为500 Hz。接收机速度为500 m/s,加速度为10g时的仿真结果如图5所示。由图5可以看出,载波跟踪环路可以快速、准确地跟踪频率的变化,在3~4 s即可达到锁定状态。本文引用地址:https://www.eepw.com.cn/article/179487.htm
6 结语
采用了二阶锁频环辅助三阶锁相环的载波跟踪环路。通过仿真可以看出,选用的鉴别器鉴别范围大,精度高,且对数据跳变不敏感。由鉴别器、环路滤波器和数控振荡器形成闭环回路,在高动态环境下,环路锁定时间短,载波测量精度高,具有一定的实用价值。








评论