基于TMS320F2812的某型光电跟瞄平台控制电路设计

摘要:为了实现光电跟瞄平台的控制回路功能,通过分析其系统构成以及伺服平台控制器进行数字化设计的必要性,提出了基于TMS320F28 12的一种全数字稳定平台伺服系统的设计,实现了DSP数字电路和电机驱动电路的设计验证工作。试验结果表明该电路较好地满足了控制回路的需求,控制精度高,运算实时性好。
关键词:TMS320F2812;稳定平台;数字伺服系统;DSP
0 引言
稳定跟踪平台由于能隔离载体(战车、导弹、飞机、舰船)的运动,对目标进行自动跟踪,所以在现代武器系统中得到了广泛的应用。对于各种车载、舰载、机载和弹载类光电成像设备,要求在载体的运动过程中成像清晰。稳定平台的主要功能是:保证视轴稳定,克服载体姿态变化对跟踪系统的影响,同时要在控制指令的驱动下完成对目标的捕获和跟踪。它的成像稳定一般有三种方式:机械稳像、光学稳像、电子稳像。机械稳像一般有陀螺直接稳像和稳定平台稳像两种。陀螺直接稳像通过将被稳定的光学系统或成像器件安装到一个旋转的陀螺上,利用陀螺的自稳定特性实现视轴的稳定;稳定平台稳像是将光学系统及成像器件安装在一个装有惯性传感器陀螺的平台上,形成陀螺稳定平台。
通过对稳定平台数字控制器进行需求分析以及对硬件性能方面的比较之后,该系统电路的处理器选用TI公司的TMS320F2812。这是一款用于数字控制处理领域的高性能数字信号处理器,最高工作频率可达150 MHz,是目前广泛用于电机控制领域的32位定点DSP芯片。乘法运算是CPU运算中最费时的一种运算,在处理乘法运算方面,F2812的CPU集成了一个16×16位的硬件乘法器,能够很方便地进行16×16位和32×32位的乘法运算。F2812具有数字信号处理能力、强大的事件管理能力以及嵌入式控制功能。本文基于TMS320F2812设计了一套稳定平台控制电路。
1 系统组成及描述
稳定平台系统主要由台体及控制电路组成。其中台体由框架、测角器、电机和测速陀螺组成。稳定平台根据使用要求的不同可以由两轴、三轴及多轴组成,下面着重介绍两轴稳定平台的系统组成,如图1所示。
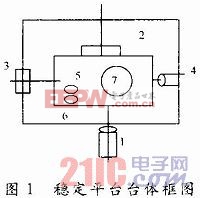
图中:1为方位电机;2为方位旋转变压器;3为俯仰旋转变压器;4为俯仰电机;5,6为光纤陀螺:7为光学系统及红外探测器。
该稳定平台具有方位和俯仰基本相同的两套稳定控制回路,通过这两套控制回路使平台在空间具有了稳定视线功能。在此基础上,由平台、成像系统和图像跟踪器构成目标跟踪控制回路。

平台利用速率陀螺来测量台体在偏航和俯仰方向上的空间角速率,构成速率稳定回路,回路结构简如图2所示。当载体运动产生的干扰力矩作用于平台时,台体产生的角速率被陀螺敏感,其输出电压经过控制电路处理后送给力矩电机产生相反的力矩来平衡干扰力矩从而使光轴对惯性空间稳定。








评论