基于组态王的远程PID控制系统的开发与实验研究

4.1 远程监控系统的登录
组态王使用B/S模式进行远程发布,无须另行安装专用软件,在客户端计算机中安装相关的JRE(JAVA runtime environment)plugging程序,便可在客户端浏览器上远程访问工程并进行调节控制。在客户端计算机的浏览器中,输入以下地址“Http://202.38.214.9:2000/Remotecontrol”访问工程。其中“Http://”不能省略,与其他网址直接输入IP地址即可访问不同。
4.2 远程监控实验
(1)实验对象
在实验室中不具备灵活可变的实物控制对象,故系统设计的时候采用了虚拟仪器软件的仿真对象,选用的具体软件是NI公司的LabVIEW虚拟仪器软件。通过对对象的开环响应曲线的研究,可发现大多数工业过程都能用一阶惯性加纯滞后(First OrderPlusDelay Time)模型来近似描述,简记为FOPDT模型。基于这一点,最小模型假设上业对象模型的传递函数为:
![]()
实验时,被控对象的放大倍数K取0.5,T(时间常数)取20s;τ(时滞)=5s。即对象为:

在LabVIEW的仿真程序中和组态王的工程中均可获得实时曲线,但并不能符合具体的实验要求,故本系统提取LabVIEW记录的lvm文件中的数据,使用Matlab软件绘制输出曲线和对象响应曲线。
(2)监控实验
客户端登录远程监控系统后,远程修改PID参数,并完成一个完整的响应过程。结果显示:控制效果良好,整体显示效果良好。
多次观察在客户端进行修改,在服务器上观察反应时间,发现在正常网速下,作用基本同步,证明可以达到远程修改PID参数进行控制的需要。
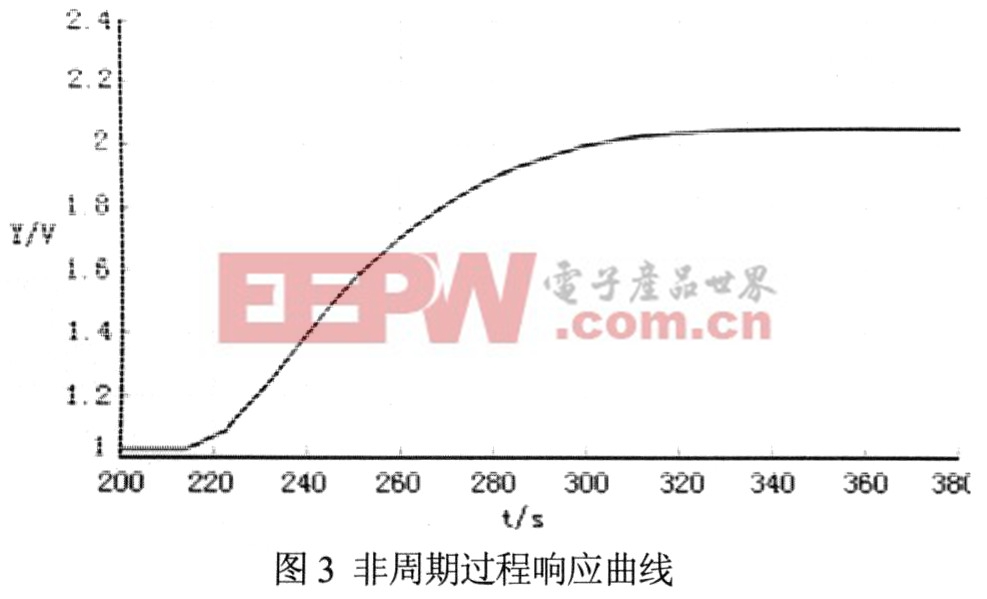
为了仔细验证该系统的远程参数整定性能,进行了以下有关实验。图3为非周期过程响应曲线。选取三个典型的响应曲线作为实验内容,并提取服务器数据记录,用Matlab将响应曲线绘制出来。
(1)非周期过程响应曲线(见图3)
PID参数具体情况如下:P=2;I=25;D=0。
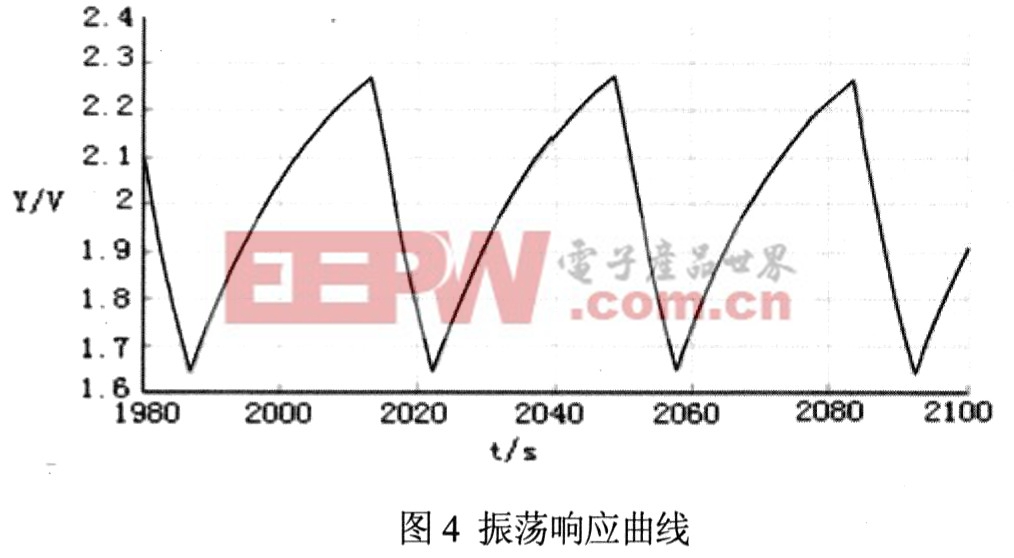
(2)等幅振荡响应曲线(见图4)
PID参数具体情况如下:P=1000;I=200;D=O。
由上述曲线可以看出,远程实时修改PID参数是完全可行的。
5 结语
在工业生产中,各种PID控制器PID参数的整定十分重要,往往需要专业人员对生产过程进行深入了解后才能整定出合理的参数。对于一些缺乏自动化技术人员的企业,其许多PID控制器往往没有运行在最佳状态,从而影响了控制质量。本文通过开发一种远程PID参数整定系统,实现了专业技术人员在异地能方便地访问生产现场的PID控制器,了解控制系统的运行状况,改变PID参数值,使其运行在最佳状态。该远程监控系统使得专业人员资源能够得到最大化的利用,可以减少大量现场整定PID参数的时间,大大提高效率,节省企业成本,是一种值得提倡的PID参数整定模式。












评论