基于DSP 的新型球形机器人控制器设计

控制系统的命令传输采用无线收发方式。发送端由控制键盘、单片机和无线发送模块组成。控制键盘包括“启动”和“停止”按钮。当按下“启动”键时,单片机就会通过无线模块发送START命令字;按下“停止”键时,单片机发送STOP命令字。接收端由接收模块及串口传输接口组成。可以将接收到的数据通过串口发送给DSP。DSP控制器在接收到命令字后执行相应的动作。无线收发模块如图6所示。
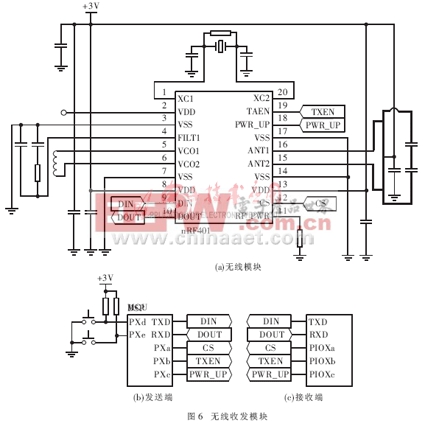
发射和接收模块电路是一致的,只是发送端的无线模块由单片机控制,而且有2个命令按钮控制发送的数据,如图6(b)。接收端的数据接口则连到DSP,如图6(c)。
3 开环控制模型
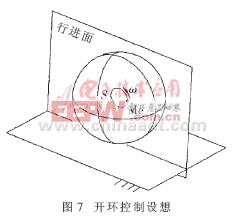
球形机器人的开环控制模型如图7所示。假如适当地控制4个偏心重块的运动,使它们的合质心Mc的运动轨迹S在竖直且过球心的行进面内作匀速圆周运动;如果忽略偏心重块转动造成的离心力和惯性力,则球体就会在平面上作直线运动或近似直线的运动。
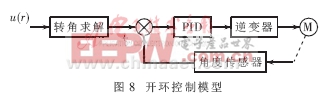
输入为给定的轨迹方程,即图7中的S,然后由转角求解器求出各电机的转角,并与实际采样所得的转角值求差分,再经PID控制器算出占空比和转向。
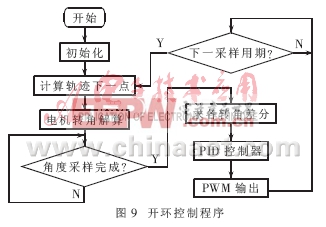
基于上述开环控制模型的控制程序框图如图9所示。由于DSP具有强大的处理能力,使得以DSP搭建的系统能及时、快速地处理机器人的多种信号。本文所描述的球形机器人控制系统,正是基于DSP处理器的这一特点,充分运用DSP强大的乘法运算能力,快速地处理机器人的位姿解算和实时控制,使球形机器人实现直线运动或更复杂的轨迹运动。

pid控制器相关文章:pid控制器原理











评论