基于DSP的双足机器人运动控制系统设计

4 软件设计
运动控制系统软件设计的关键是接收到主控计算机传来的运动控制指令后,电机是否能够达到要求的速度和角度,考虑到整个系统运行过程中不可避免的误差,特别引入补偿算法,实现速度和位置双闭环PID控制,其具体的控制流程如图4所示。
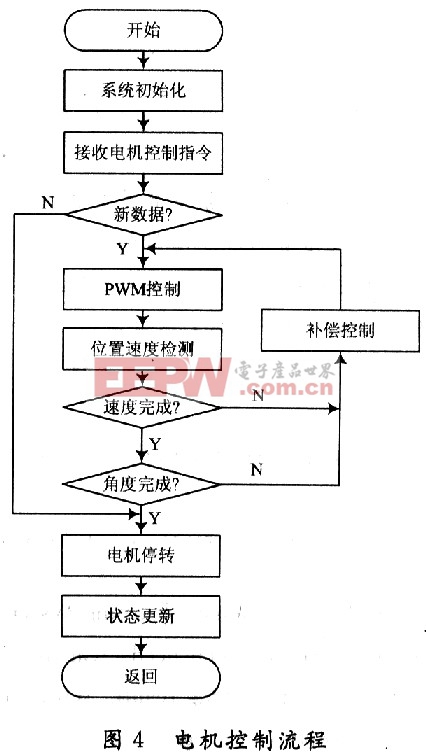
主控计算机根据步态规划的数据,发出运动指令,生成下一个运动周期各个电机的转动方向和角度等控制参数,运动控制器接收到新的数据之后,PWM控制根据数据计算出占空比信息并生成相应的PWM波,进而控制电机转动,随后将电机光电编码器传送回的信号转换成关节位置和速度等信息,补偿控制针对速度和位置误差采用PID算法进行调节,计算需要的执行量,调整PWM波形,在每一个运动周期内使电机达到指定的速度,并使运动中的关节电机能够克服机器人重力和外力的影响,保持在设定的角度。图5是CCS仿真调试时,程序运行后在指定的摆动角度下监控到的单关节电机速度跟踪曲线,其响应时间和稳定性基本满足双足步行的要求。

5 结语
介绍了一种基于DSP的无刷直流电机运动控制系统,在控制方案的具体实现过程中,根据机器人腿部系统的自身特点,将控制器围绕DSP处理和电机控制电路来分别设计,这样既方便设计和调试,又增强了系统的灵活性和扩展性。电机驱动采用速度和位置双闭环控制,保证运转精度。经测试,系统基本满足运动控制的要求,为双足步行规划提供了试验平台。












评论