基于T-S模型的旋转式起重机稳钩保性能控制

4 旋转式起重机稳钩的保性能控制器的设计及仿真
4.1 保性能控制器设计
考虑到旋转式起重机系统的不确定因素主要为绳子的长度l和货物的重量m。另外,当l和m变化时,在0°处线性化模型参数变化范围更大。选择:
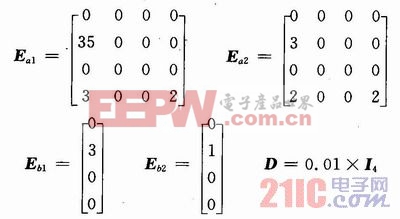
式中:I4表示4阶的单位矩阵。
对于旋转式起重机系统,主要目标是尽量减小其摆动的角度和位移偏差,因而选取加权阵为:
当初始状态x(0)=[0.2,0,0,0]T时,利用LMI求解的优化问题可得性能指标的上界J’=6.334 32和保证这一性能的PDC结构的模糊控制器的状态反馈增益矩阵:
4.2 仿真
采用给出的保性能控制律,分别针对货物的质量波动和绳长的尺寸偏差这两种不确定情况以及外界干扰,对旋转式起重机进行了仿真。系统初始值如前所述。
从图1~图4可以看出,货物在7 s之内结束摇摆状态,角度变为零。可见,这种方法比文献中相同条件下最少8 s的稳钩时间还要短,很快抑制了摇摆,而且旋转式起重机在货物质量波动为±25%,绳长在±25%时,响应曲线几乎是重合的,摆动角度很快达到了零,所以这种控制器不但具有很好的稳钩效果,而且具有很强的鲁棒性。本文引用地址:https://www.eepw.com.cn/article/162086.htm
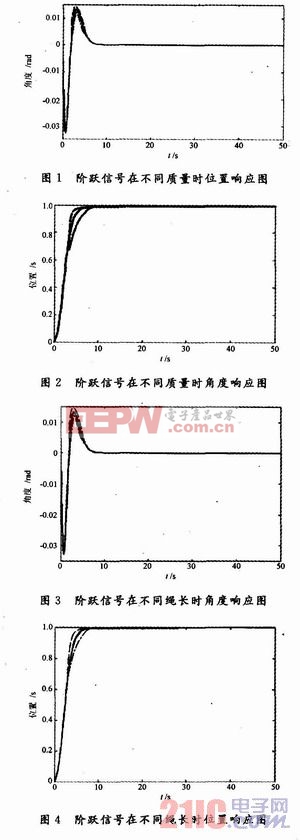
图1和图2中,虚线、实线、划线分别表示正常、80%、120%货物载荷的状态响应。图3和图4中虚线、实线、划线表示正常、80%、120%绳长的状态响应。
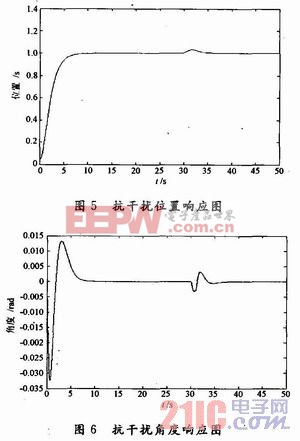
为了验证其鲁棒性,可以在30 s时加一个干扰,得到的结果如图5和图6所示,在解除干扰后3 s内回复原位,并且有很少的超调量,位置和角度只经过一个非常短时的变化且变化平缓。仿真结果表明,这种控制器对外界的干扰有很强的抗干扰性能。
5 结语
基于T-S模型的保性能控制有很强的鲁棒性,分析了基于T-S模型的保性能控制的设计方法,把它转化为解一系列矩阵不等式(LMI)的问题,得出最优的反馈矩阵。把这种控制方法应用在旋转式起重机的系统上,分别对质量波动和绳长波动以及外界干扰做了仿真。仿真结果表明,这种方法能使系统具有很好的稳定性,同时还能保住系统的一些固有性能。







评论