基于热释电传感器的位置相关算法研究

热释电传感器的输出信号直流电平为1V,幅度为1mV的交变信号,该信号通过热释电传感器内部场效应管的源极输出,即图1中的节点1。第一级运算放大器(U1)是低频小信号放大电路,输出节点为3。第二级运算放大器(U2)为具有微分补偿电路的直流放大电路,由元件C1、R6、R7、R8和U2组成,输出电压V3波形如图2。
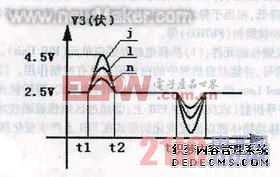
图2信号调理电路输出电压波形
图中t1~t2之间的曲线表示当人员进入传感器时波形变化情况,t2~t3之间的曲线表示当人员在传感器内部时波形变化情况,t3~t4之间的曲线表示当人退出传感器时的波形变化情况。从波形的变化可以看出:当人员进入传感器时,在直流电平2.5V的基础上迭加了一个正的电压波形,而退出时,迭加了负的电压波形,由此得出结论:人员进入时信号幅度正向增大,而退出时信号幅度间反向增大,该结论作为人员定位与移动相对位置匹配算法的判定依据。
2.1算法的设计思想
定位软件是指通过特定的算法确定人员具体位置的软件,从而确定是否进行预报警或者报警,若预报警,则单片机发送预报警指令,进行声光报警;如报警,除了启动声光报警装置外,同时应将大型机械停车,以确保人员安全。为此,算法设计的关键是将探测区域进行合理的划分。
2.2算法的具体实现
图3是由三个热释电传感器辐射区域交叉组成的平面结构图。三个传感器辐射区域两两相交,共分为8个区域,将这些区域划分为安全区、预报警区和报警区。其中1、2、3、4、6、7为预报警区,5为危险区,若有人进入该区则报警并输出闭锁控制信号,使转载机停车。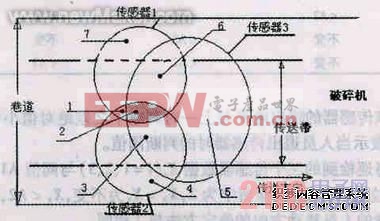
图3三个传感器辐射交叉平面结构图
2.2.1具体数据格式
前一时刻的位置表示人员上一时刻在探测范围内的具体位置,作为移动方向判定的基本依据;传感器1、传感器2和传感器3表示三个传感器检测信号经A/D转换后的数值;PLAST为上一时刻人员的位置(0~7),称之为保留字,初值为0,表示人员在报警区以外的安全位置。②X=[ X1,X2,X3]。XK表示人进入(或者退出)由K号传感器所确定的平面区域时,传感器的检测信号经过模数转换后的值,它的范围为00~FFH,对应模拟量0~5V。设无人进出时,信号调理电路的输出直流电平为2.5V,但是由于环境噪声的存在(如:气流的变化、湿度的变化、大型机械的的开停等),信号调理电路的输出信号迭加了一定的噪声电平△A,总输出为2.5+△A,△A可正可负,它的值可通过单片机学习功能得到。












评论