基于GPRS&GPS的防盗追踪系统的设计方案

正常情况下, MCU 关断这2 个模块的电源, 只间隔一定的时间启动这两个模块报告设备状况。当传感器一旦检测到有异动, 处理器马上打开这2 个模块的供电, 使用GPS进行位置定位, GPRS 向用户发送设备状况以及报警。
L T3125 是凌力特尔公司的一款DC-DC 电源芯片, 输入电压可在1. 8~ 5. 5 V, 输出在2~ 5 V 可调, 输出峰值电流1. 2 A, 并带使能控制开关。此芯片刚好能满足本系统的要求, 在电池低于3. 6 V, 一直到1. 8 V 也能确保GPRS 能正常工作。
L P3996 是美国国家半导体公司生产的一款带控制开关的LDO 芯片, 能把3. 6 V 输入电压转成3. 3 V 电压稳定输出, 具有低纹波特点, 刚好满足GPS 模块低纹波输入要求。
3. 2 处理器与通信模块
GPRS 与GPS 模块都是通过UA RT 接口对外进行通信, 如图4 所示。GPRS 模块对外的接口为一个标准的9线U ART 接口, 其电平为2. 8 V, 而处理器的电平为3. 3V, 因此在GPRS 模块与处理器之间需要有一个电平转换的buffer , 实现接口的电平匹配。系统采用的是IDT74FCT 3244Q8 作为电平转换的芯片。GPS 模块也是通过一个U ART 串行接口与单片机进行通信, 此串行接口使用起来比较简单, 只有收发2 根线。
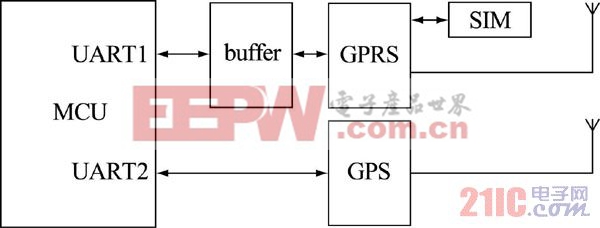
图4 GPRS、GPS 通信模块
处理器采用的是ATMEL 公司的A T91SAM7S 系列的A RM7 芯片, 具有3 个U ART , 其中一个为标准的9 线串口, 8 路A D, 内嵌512K 的Flash, 能满足系统的需求。
GPRS 模块则采用的是WAV ECOM 公司的Q 24PLUS 型号, 此模块集成了T CP/ IP 协议栈, 对外的接口为一9 线标准串口, 通过此串口利用AT 指令控制模块, 能够实现数据的透明传输。支持GSM、GPRS 网络, 以及4 频段载波。GPS 模块采用的是U blox 公司的LEA-5H 型号,支持冷热双启动模式、快速定位, 内含RAM, 在有后备电池的情况下能保存位置信息, 实现快速热启动。输出的信息为国际标准的NMEA 格式的字符串, 对外接口为2 线串行接口, 用户只需接收NMEA 字符串, 并按格式提取相应信息即可。
3. 3 处理器与传感器
传感器采用的是Analog Device 生产的一款三维重力加速度传感器, 其型号是ADXL335, 此传感器能精确的实时的测量三维方向上的加速的大小, 并量化成电压值从3个接口输出, 用户只需测量这3 个电压值的大小, 并通过特定的公式计算, 从而得知3 个方向上的加速度大小。系统采用3 路10 位的AD 对输出的电压进行采样, 从而得到较为精确的电压值, 并在处理器内部通过一定的算法,把这3 个电压值换算成加速度值, 从而判断物体是否发生运动。
4 系统软件设计
系统的处理器为A RM7 处理器, 并采用ECOS 嵌入式操作系统, 所有的软件都是基于ECOS 平台进行开发的。系统的软件架构如图5 所示。最底层的是位于硬件层之上的驱动层, 包括GPRS、GPS、传感器, FLASH 等一些驱动模块; 再上一层就是操作系统层, 这些模块都在ECOS 操作系统目录下而被ECOS 调用; 位于操作系统之上的即为应用层。应用层包含了系统要求的各项功能: 系统初始化、GPS 追踪定位、运动检测、用户命令处理等。

图5 系统软件架构
4. 1 追踪定位过程
一般情况下, 系统处于休眠模式, 并侦听唤醒信号的到来, 一旦接收到唤醒信号, 开始检查物体是否被移动, 若没有移动, 则仍然用以前的位置信息作为现在的位置信息, 一旦检测到移动, 则马上启动GPS 模块, 实时获取当前的位置信息, 并覆盖以前的位置信息, GPRS 再把新获取的位置信息报告给上位机, 实现位置的实时跟踪。











评论