方向盘转向角传感器的数据采集系统设计

3.2 在上位机上对方向盘转向角传感器接收的数据进行处理
ARM通过CAN总线把从转向角传感器接收的数据通过串口送到上位机上,并且以txt的格式存储在上位机上,由于Matlab具有强大的数据处理及可视化功能,所以在上位机上利用Matlab对接收来的数据进行处理。由于方向盘转向角传感器的数据是通过CAN总线以帧的形式进行发送的,是一串十六进制数字,分别代表的是转向角传感器采集到的方向盘转角,转角方向以及角速度,在实际应用中需要对这些数据进行分割,从中提取出方向盘的转角,转角方向以及角速度。其相应的转向角方向以及转向角显示结果如图5所示。
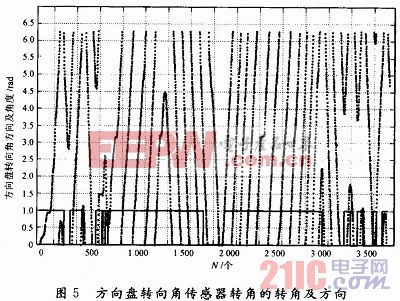
图5中横坐标N是采集的数据量,取了4 000个数据点。以采集第一个数据的时间为0时刻,以后每个数据点之间的时间间隔是10.3 ms,由于数据点比较多,横坐标只取了具有代表性的数据点。图中纵坐标分别代表的是方向盘转向角传感器转角的方向和大小,用蓝色的点表示转角的大小(采用弧度制),红色的曲线表示转角的方向。方向盘转向角的方向,顺时针方向用1来表示,逆时针方向用0来表示,在Matlab中通过绘图的方式把这些数据形象的显示出来。
4 结论
本文通过对转向角传感器数据采集系统的设计,采集到了方向盘转向角传感器的转向角,转向角速度和方向三个参数,并对采集到的数据进行了相应处理。经分析表明,方向盘转向角传感器的数据采集系统设计是有效的、可行的,能为汽车前向灯自适应控制提供准确的方向盘转向角相关参数信息。











评论