基于步进电机细分驱动的太阳能自动跟踪系统的设计

摘要:为了高效地利用太阳能,根据太阳运行规律,结合光电传感器设计以单片机为核心的太阳能自动跟踪系统。首先进行硬件设计和系统控制的软件实现,然后深入地分析比较步进电机一般驱动和细分驱动对太阳能自动跟踪精度的影响。研究结果表明,与采用一般驱动方法的系统相比,采用步进电机细分驱动的太阳能自动跟踪系统跟踪精度高,有效地提高太阳能利用率。
关键词:太阳能;自动跟踪;步进电机细分驱动;跟踪精度
能源短缺问题是目前许多国家面临的重要问题,太阳能作为一种清洁无污染的能源,有着巨大的开发前景。我国是一个太阳能资源较为丰富的国家,充分利用太阳能资源,有着深远的能源战略意义。利用太阳能的关键是提高太阳能电池板采集太阳能的效率,太阳能电池板接受太阳光的直射,由此得到太阳最大光照强度,从而最大限度的采集太阳能,目前太阳能电池板普遍采用半自动单轴跟踪方式和电池板固定朝南安装的方式。这些方法存在的缺点是:转换效率较低、跟踪适应能力弱、跟踪精度低。本文根据太阳运行规律,结合光电传感器设计太阳能自动跟跟系统。设计硬件和软件控制流程,深入地分析比较步进电机一般驱动和细分驱动对太阳能自动跟踪精度的影响。该系统跟踪能双轴跟踪,精度高,适应性强,有望在光伏发电中使用。
1 太阳能自动跟踪系统的设计
1.1 太阳运行规律
为了提高太阳能电池板对光能的采集效率,需要尽可能的保持太阳光垂直照射到太阳能电池板上。从高度角方位角两个物理量是可以描述太阳的这种位置变化的,太阳能电池板对高度角和方位角的跟踪就能保证阳光垂直照射电池板,但是在一般情况下还需要光电传感器反馈来对跟踪的误差进行修正,以提高自动跟踪的精度。
太阳高度角α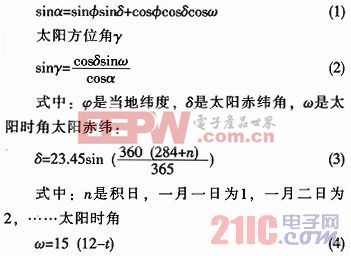
式中:t是一天当中的时刻。
由式(1)-(4)可计算出太阳高度角和方位角,以此进行两个角度的双轴跟踪,来实现太阳能自动跟踪。
1.2 系统总体设计
太阳能自动跟踪系统的总体结构框图如图1所示。整个系统分为六个部分:时钟模块,初始位置校验,单片机模块,驱动模块,光电检测模块和太阳能电池板。单片机是整个跟踪系统的核心,负责运算和控制。时钟模块主要把全年每天的时间提供给单片机。驱动模块包括光电隔离、步进电机驱动和步进电机,为了消除干扰,单片机和步进电机驱动之间需要加隔离;由于是在高度角和方位角两个方向上进行双轴跟踪,因此需要两个相同的驱动模块。传感器模块包括四象限探测器、信号处理电路和A/D转换电路。太阳光线垂直照射四象限探测器时,它四个象限的输出电流等;
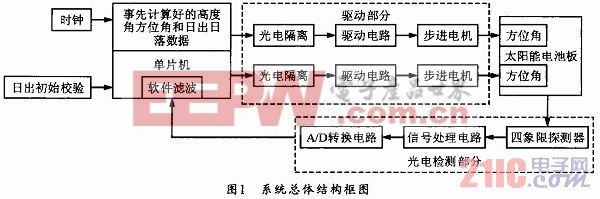
当发生偏移时,四个象限的电流不等,通过四象限探测器的这种特点检测太阳光是否直射太阳能电池板。信号处理电路负责信号采集放大,把电流信号转化为相应的电压量并放大后,通过A/D后送入单片机运算分析并发出控制信号给步进电机。
1.3 硬件设计
系统的控制核心采用的单片机是AT89S51;时钟芯片是DS1302;日出初始位置校验需要使用微动开关,系统使用三洲集团乐拉电器厂的LXW5-11G2。
光电检测部分: (1)四象限探测器具有低暗电流,高可靠性、高均匀性、高对称性,盲区小的优点,系统采用的四象限探测器为Pacific Silicon Sensor的QP20—6T08S。四象限探测器示意图如图2所示,器件是反向偏置的半导体二极管阵列,其工作原理是:当太阳光垂直照射器件各个象限时,各个象限输出的光电流ia、ib、ic、id相等;而当目标发生偏移时,各个象限的输出光电流不等,光电流经信号变换及放大后变为相应的电压量,太阳运动的两个偏移量由式(5)算出,由此可测出太阳的方位,从而起到跟踪的作用。四象限探测器能在东西方向(方位角方向)和南北方向(高度角方向)上进行双轴跟踪。并且通过四个象限的电流和还可以进行阴晴天的判断,晴天时,太阳光线强,所产生的电流大,阴天时产生的电流小,因此确定一个阈值就能判断天气,经实验后得这个阈值为1.12V。(2)测量四象限探测器其中一个象限所用的光电探测电路如图3所示,每个象限都使用完全相同的光电探测电路。电阻把光电二极管输出的光电流转换为电压信号,运放将这个压信号作适当的放大,四象限光电探测器所产生的阻抗电流,其值一般为mA级,经试验后知需要放大的倍数为2倍。(3)转换器采用的是ADC0809,它是8位逐次逼近式A/D转换器,其内部有一个8通道多路开关,它可以根据地址码锁存译码后的信号,只选通8路模拟输入信号中的一个进行A/D转换,是目前国内应用最广泛的8位通用A/D芯片。
![]()
![]()










评论